2025 Christmas Release of Eclipse MOSAIC
The special Christmas release of Eclipse MOSAIC is here! 🎄 The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 25.2 to the open source community. The release brings built-in support for your DRT (Demand Responsive Traffic) simulation needs.
2025 Autumn Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 25.1 to the open source community. The new version finally introduces detailed full-stack simulation of cellular communication in ns-3, starting with the LTE C-V2X stack.
2025 Spring Release of Eclipse MOSAIC
The spring release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 25.0 to the open source community. This new version comes with an improved Application API, new components towards multi-modality, an extended 2D visualization, as well as usability improvements for the communication simulators OMNeT++ and ns-3 .
From Simulation to Innovation: Transforming Mobility with Eclipse MOSAIC
Eclipse MOSAIC is a cutting-edge simulation framework that facilitates innovation in connected and automated mobility. This multi-domain and multi-scale tool empowers you to tackle complex mobility challenges with precision and efficiency.

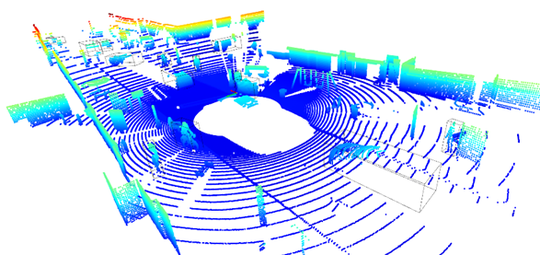
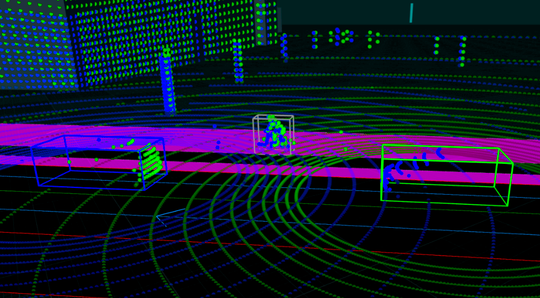
Publication of the LUCID Dataset
We are excited to announce the release of the LUCID Dataset, a novel synthetic street-view LiDAR dataset designed to advance computer vision and object detection in the automated driving domain. Comprising 100 scenarios with approximately 1.1 hours of drive time, 40,000 frames, and 500,000 bounding boxes, the LUCID Dataset is a significant resource for researchers and developers.
2024 Autumn Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 24.1 to the open source community. This release concentrates less on new features, but on improving documentation and tutorials.

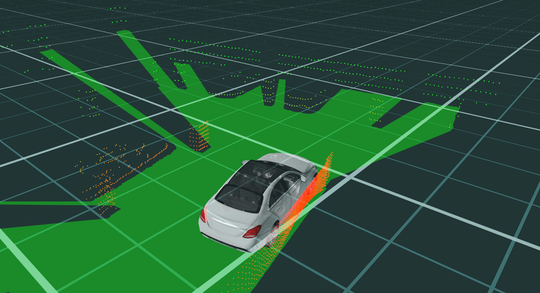
AI-NET-ANTILLAS - Perception for Remote Operated Driving
After four years of research, the AI-NET-ANTILLAS project has concluded, and the final event took place in conjunction with the Berlin 6G Conference 2024. Collaborating with our partners, we integrated several key components: Cloud-based LIDAR processing, next generation networks, and artificial intelligence, to create a new service and application platform.

2024 Spring Release of Eclipse MOSAIC
The spring release of Eclipse MOSAIC has arrived! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 24.0 to the open source community. This new version comes with an updated routing library and improved simulation of cellular communication.
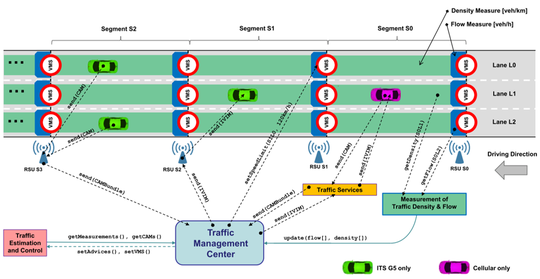
Simulated Testing of Traffic State Estimation using Eclipse MOSAIC
Daily commutes can quickly turn into stressful affairs when overcrowded roads become congested and what would be a 20 minute ride becomes an hour of staring at the license plate of your fellow comrade-in-traffic. Real-time Traffic State Estimation (TSE) aims to alleviate this strain by predicatively recognizing congested areas and offering alternative routing options. In a recent publication we established a framework for easy implementation and evaluation of novel TSE systems.

2023 Autumn Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC has arrived! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 23.1 to the open source community. This new version brings the perception facilities in the Application simulator to a stable state and comes with improvements across several integrated MOSAIC models.

Meet the MOSAIC developers at EclipseCon
From October 16 to 19 we will be present at EclipseCon 2023 in Ludwidgsburg, Germany. Meet us at the Community Day, watch our talk, and connect with the developers behind Eclipse MOSAIC.

2023 Spring Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 23.0 to the open source community. This new version improves the recently introduced perception facilities in the Application simulator and brings better handling of the traffic simulation SUMO.
2022 Autumn Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 22.1 to the open source community. This new version extends the recently introduced perception facilities in the Application simulator and upgrades the ns-3 simulator coupling.
Introducing the BeST Scenario
We present a large-scale traffic scenario of Berlin for the Evaluation of Smart Mobility Applications. This scenario provides 24 hours of motorized private traffic, including almost 2,25 million individual trips. The Berlin SUMO Traffic (BeST) scenario is open-source and prepared to be compatible with Eclipse MOSAIC.

Virtual Testing of Touring Solutions for Vehicle Fleets
Courier-, Express- & Parcel-providers (CEP-Providers) play an evermore important role in the daily lives of many people. To guarantee timely deliveries and customer satisfaction, these providers rely on sophisticated algorithms to manage the disposition of their fleets. In the course of the eBaseCamp-project, Eclipse MOSAIC has been utilized and extended to model a delivery service leveraged by e-mobility and a Base Camp infrastructure.
2022 Spring Release of Eclipse MOSAIC
The spring release of Eclipse MOSAIC has arrived! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 22.0 to the open source community. This new version introduces perception facilities to the Application simulator and improved the integration of the traffic simulator SUMO.
Evaluating Cooperative LiDAR Data Fusion for VRU Safety with MOSAIC Extended
People traveling by bike, on foot or e-scooters are little protected in the event of a collision and therefore known as Vulnerable Road Users (VRUs). Modern sensor systems for automated driving such as LiDAR are able to detect VRUs, thus facilitate warnings and safety. Yet, in certain situations, local blind spots could occur. Data fusion from different vehicles could solve this issue - as it is shown in a simulation study using PHABMACS and MOSAIC Extended.
2021 Autumn Release of Eclipse MOSAIC
A new release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 21.1 to the open source community. This new version focuses on a better usage of communication simulators SNS, OMNeT++, and ns-3, and allows to use a much faster integration of the traffic simulator SUMO.

Testing Remote-Operated Driving virtually with Eclipse MOSAIC
Remote-Operated Driving is the bridge technology from human towards fully automated driving. In situations outside the driving domain of a highly-automated vehicle, e.g. if data is missing, or the autonomous function is unsure to make a certain decision, remote-operation is the key.
2021 Spring Release of Eclipse MOSAIC
The spring release has arrived! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 21.0 to the open source community. This new version focuses on a much better integration of SUMO configurations, and introduces a new Server entity to the Application Simulator.

Studying Traffic Control Algorithms in MOSAIC
The simulative investigation of communication-based Traffic Management solutions requires combining models from different domains. Eclipse MOSAIC suits very well for this purpose as it couples multiple simulators to model vehicle movement pattern, infrastructure sensors, (variable) traffic signs, as well as different communication links (ITS-G5, 4G/5G) between vehicles and backends, and the application logic in entities like vehicles and a Traffic Management Center.
First Release of Eclipse MOSAIC
The initial contribution is accomplished! With the autumn version, the committer team from Fraunhofer FOKUS and DCAITI is proud to release Eclipse MOSAIC 20.0 to the open source community. With the runtime infrastructure, core libraries and various implementations of simulators or couplings to existing ones, Eclipse MOSAIC includes the essential feature collection for simulation and virtual testing of connected and automated mobility solutions.

Testing mobility scenarios with the Open-Source simulation environment Eclipse MOSAIC
On the occasion of EclipseCon 2020, Fraunhofer FOKUS launches its simulation environment Eclipse MOSAIC. This solution is based on VSimRTI (Vehicle-2-X Simulation Runtime Infrastructure), which has been developed over the last 15 years in close cooperation with the DCAITI of the TU Berlin and has already been used by more than 600 partners to test mobility services and traffic scenarios. Eclipse MOSAIC is now partially available as open-source.
