A Multi-Domain and Multi-Scale Simulation Framework
for Connected and Automated Mobility.
A Multi-Domain and Multi-Scale Simulation Framework
for Connected and Automated Mobility.
Eclipse MOSAIC allows you to combine simulation models from multiple domains — such as applications, traffic, and communication — at various scales, including microscopic traffic and detailed vehicle simulations.
Development of smart and sustainable mobility applications for all kinds of users and impact assessment in future traffic models.
Realistic modelling and simulation of communication links via 4G/5G cellular and ITS-G5 ad-hoc networks.
Integration of Vulnerable Road User (pedestrians, cyclists) into simulation scenarios to increase the public safety.
Management and control of road infrastructure to avoid traffic jams, prioritize emergency vehicles and increase overall traffic efficiency.
Integration of electric vehicles and battery components as well as charging infrastructure for green mobility solutions.
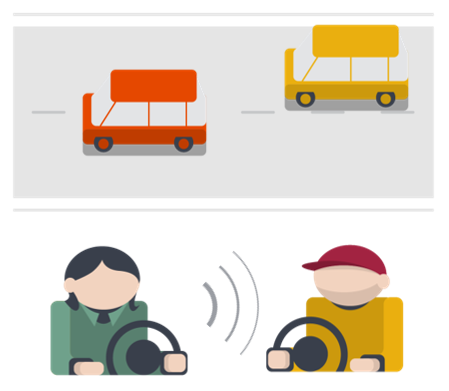
Virtual Testing of ADAS functions for collaboration among vehicles to increase safety and improve efficiency.
The Eclipse MOSAIC Co-Simulation Framework flexibly couples simulators from different domains to create a holistic collection of simulation models for different scales. Eclipse MOSAIC improves the development and virtual testing of new Mobility Apps. Simulators can be exchanged according to the scenario and additional simulators can be coupled easily to extend Eclipse MOSAIC.
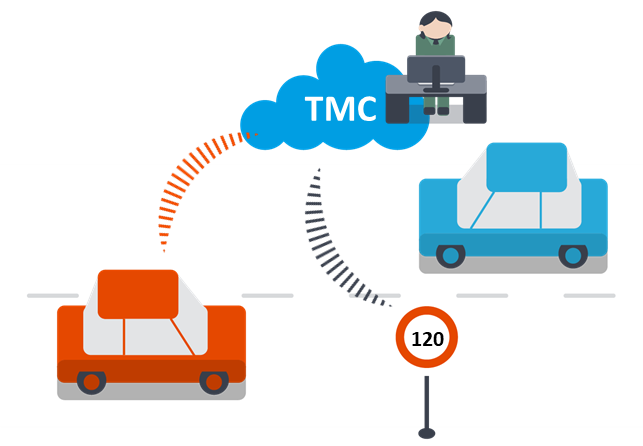
As an example, Traffic Management Centers may be equipped with an application that receives V2X messages of road participants, analyzes the traffic volume and controls traffic lights and variable message signs to reduce traffic density.
Furthermore, vehicles may be equipped with applications that receive V2X messages from the TMC with further information or specific route suggestions.
The simulation platform for discrete-event systems OMNeT++ together with the INET framework provide all models necessary for Vehicle-2-X communication.
The Network Simulator OMNeT++ couples OMNeT++ and INET to the Eclipse MOSAIC framework. It can be used for examinations that require precise communication simulation.
The Physics Aware Behavior Modelling Advanced Car Simulator (PHABMACS) provides a sophisticated framework for testing ADAS within a simulated environment. Vehicles are simulated with advanced simulation models providing them with realistic driving dynamics within normal traffic situations.
Tested ADAS can utilize simulated sensor data as well as control simulated vehicles by using virtual actuators.
CARLA is an open-source vehicle and environment simulator which supports development, training, and validation of autonomous driving systems. In addition to open-source code and protocols, CARLA provides open digital assets (urban layouts, buildings, vehicles) that were created for this purpose and can be used freely. The simulation platform supports flexible specification of sensor suites, environmental conditions, full control of all static and dynamic actors, maps generation and much more.
The coupling interface to integrate the CARLA simulator is currently under internal development and will be published soon.
With the tool FileOutput you have the opportunity to log specific Eclipse MOSAIC interactions.
Interactions are events that are managed by the Interaction Management and i.e. enable coupled simulators to react on specific events fired by another simulator.

Catch up with the latest news on the development of Eclipse MOSAIC and other updates.