

Meet the MOSAIC developers at EclipseCon
From October 16 to 19 we will be present at EclipseCon 2023 in Ludwidgsburg, Germany. Meet us at the Community Day, watch our talk, and connect with the developers behind Eclipse MOSAIC.

2023 Spring Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 23.0 to the open source community. This new version improves the recently introduced perception facilities in the Application simulator and brings better handling of the traffic simulation SUMO.

2022 Autumn Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 22.1 to the open source community. This new version extends the recently introduced perception facilities in the Application simulator and upgrades the ns-3 simulator coupling.


Introducing the BeST Scenario
We present a large-scale traffic scenario of Berlin for the Evaluation of Smart Mobility Applications. This scenario provides 24 hours of motorized private traffic, including almost 2,25 million individual trips. The Berlin SUMO Traffic (BeST) scenario is open-source and prepared to be compatible with Eclipse MOSAIC.
Virtual Testing of Touring Solutions for Vehicle Fleets
Courier-, Express- & Parcel-providers (CEP-Providers) play an evermore important role in the daily lives of many people. To guarantee timely deliveries and customer satisfaction, these providers rely on sophisticated algorithms to manage the disposition of their fleets. In the course of the eBaseCamp-project, Eclipse MOSAIC has been utilized and extended to model a delivery service leveraged by e-mobility and a Base Camp infrastructure.
2022 Spring Release of Eclipse MOSAIC
The spring release of Eclipse MOSAIC has arrived! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 22.0 to the open source community. This new version introduces perception facilities to the Application simulator and improved the integration of the traffic simulator SUMO.
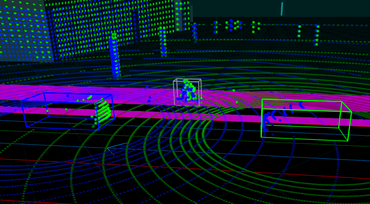
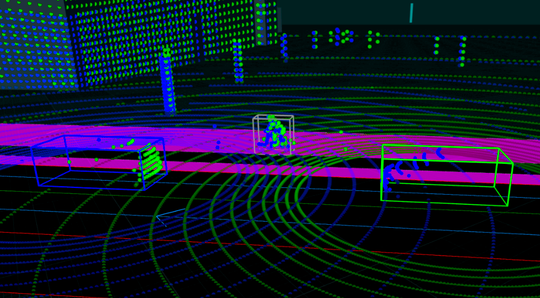
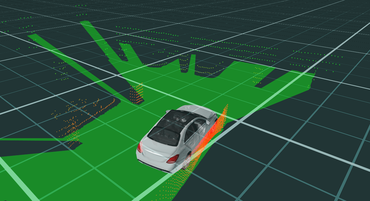
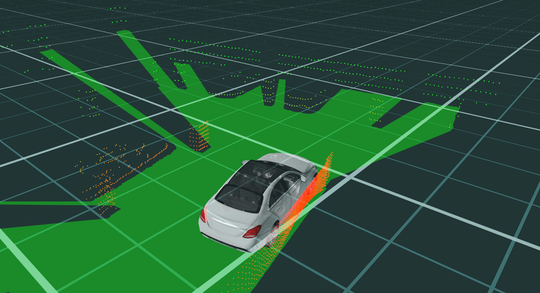
Evaluating Cooperative LiDAR Data Fusion for VRU Safety with MOSAIC Extended
People traveling by bike, on foot or e-scooters are little protected in the event of a collision and therefore known as Vulnerable Road Users (VRUs). Modern sensor systems for automated driving such as LiDAR are able to detect VRUs, thus facilitate warnings and safety. Yet, in certain situations, local blind spots could occur. Data fusion from different vehicles could solve this issue - as it is shown in a simulation study using PHABMACS and MOSAIC Extended.


2021 Autumn Release of Eclipse MOSAIC
A new release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 21.1 to the open source community. This new version focuses on a better usage of communication simulators SNS, OMNeT++, and ns-3, and allows to use a much faster integration of the traffic simulator SUMO.
Testing Remote-Operated Driving virtually with Eclipse MOSAIC
Remote-Operated Driving is the bridge technology from human towards fully automated driving. In situations outside the driving domain of a highly-automated vehicle, e.g. if data is missing, or the autonomous function is unsure to make a certain decision, remote-operation is the key.


2021 Spring Release of Eclipse MOSAIC
The spring release has arrived! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 21.0 to the open source community. This new version focuses on a much better integration of SUMO configurations, and introduces a new Server entity to the Application Simulator.