Vehicle App SDK
Introduction
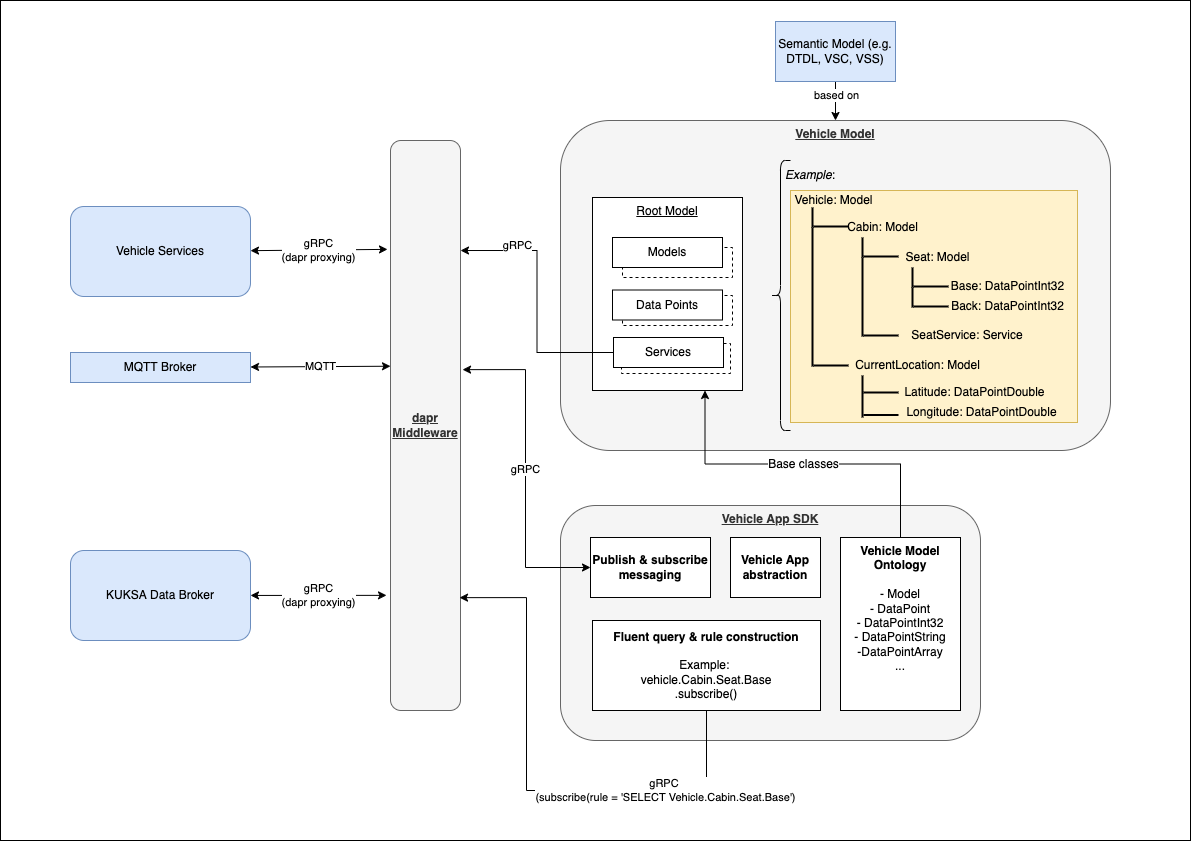
The Vehicle App SDK consists of the following building blocks:
-
Vehicle Model Ontology : The SDK provides a set of model base classes for the creation of vehicle models.
-
Middleware integration : Vehicle Models can contain gRPC stubs to communicate with Vehicle Services. gRPC communication is integrated natively.
-
Fluent query & rule construction : Based on a concrete Vehicle Model, the SDK is able to generate queries and rules against the KUKSA Databroker to access the real values of the data points that are defined in the vehicle model.
-
Publish & subscribe messaging : The SDK supports publishing messages to a MQTT broker and subscribing to topics of a MQTT broker.
-
Vehicle App abstraction : Last but not least the SDK provides a
VehicleAppbase class, which every Vehicle App derives from.
An overview of the Vehicle App SDK and its dependencies is depicted in the following diagram:
Vehicle Model Ontology
The Vehicle Model is a tree-based model where every branch in the tree, including the root, is derived from the Model base class provided by the SDK.
The Vehicle Model Ontology consists of the following classes:
Model
A model contains data points (leaves) and other models (branches).
ModelCollection
Info
The ModelCollection is deprecated since SDK v0.4.0. The generated vehicle model must reflect the actual representation of the data points. Please use the Model base class instead.Specifications like VSS support a concept that is called
Instances
. It makes it possible to describe repeating definitions. In DTDL, such kind of structures may be modeled with
Relationships
. In the SDK, these structures are mapped with the ModelCollection class. A ModelCollection is a collection of models, which make it possible to reference an individual model either by a NamedRange (e.g., Row [1-3]), a Dictionary (e.g., “Left”, “Right”) or a combination of both.
Service
Direct asynchronous communication between Vehicle Apps and Vehicle Services is facilitated via the gRPC protocol.
The SDK has its own Service base class, which provides a convenience API layer to access the exposed methods of exactly one gRPC endpoint of a Vehicle Service or another Vehicle App. Please see the
Middleware Integration
section for more details.
DataPoint
DataPoint is the base class for all data points. It corresponds to sensors/actuators/attributes in VSS or telemetry/properties in DTDL.
Data points are the signals that are typically emitted by Vehicle Services or Data Providers.
The representation of a data point is a path starting with the root model, e.g.:
Vehicle.SpeedVehicle.FuelLevelVehicle.Cabin.Seat.Row1.Pos1.Position
Data points are defined as attributes of the model classes. The attribute name is the name of the data point without its path.
Typed DataPoint classes
Every primitive datatype has a corresponding typed data point class, which is derived from DataPoint (e.g., DataPointInt32, DataPointFloat, DataPointBool, DataPointString, etc.).
Example
An example of a Vehicle Model created with the described ontology is shown below:
## import ontology classes
from sdv import (
DataPointDouble,
Model,
Service,
DataPointInt32,
DataPointBool,
DataPointArray,
DataPointString,
)
class Seat(Model):
def __init__(self, name, parent):
super().__init__(parent)
self.name = name
self.Position = DataPointBool("Position", self)
self.IsOccupied = DataPointBool("IsOccupied", self)
self.IsBelted = DataPointBool("IsBelted", self)
self.Height = DataPointInt32("Height", self)
self.Recline = DataPointInt32("Recline", self)
class Cabin(Model):
def __init__(self, name, parent):
super().__init__(parent)
self.name = name
self.DriverPosition = DataPointInt32("DriverPosition", self)
self.Seat = SeatCollection("Seat", self)
class SeatCollection(Model):
def __init__(self, name, parent):
super().__init__(parent)
self.name = name
self.Row1 = self.RowType("Row1", self)
self.Row2 = self.RowType("Row2", self)
def Row(self, index: int):
if index < 1 or index > 2:
raise IndexError(f"Index {index} is out of range")
_options = {
1 : self.Row1,
2 : self.Row2,
}
return _options.get(index)
class RowType(Model):
def __init__(self, name, parent):
super().__init__(parent)
self.name = name
self.Pos1 = Seat("Pos1", self)
self.Pos2 = Seat("Pos2", self)
self.Pos3 = Seat("Pos3", self)
def Pos(self, index: int):
if index < 1 or index > 3:
raise IndexError(f"Index {index} is out of range")
_options = {
1 : self.Pos1,
2 : self.Pos2,
3 : self.Pos3,
}
return _options.get(index)
class VehicleIdentification(Model):
def __init__(self, name, parent):
super().__init__(parent)
self.name = name
self.VIN = DataPointString("VIN", self)
self.Model = DataPointString("Model", self)
class CurrentLocation(Model):
def __init__(self, name, parent):
super().__init__(parent)
self.name = name
self.Latitude = DataPointDouble("Latitude", self)
self.Longitude = DataPointDouble("Longitude", self)
self.Timestamp = DataPointString("Timestamp", self)
self.Altitude = DataPointDouble("Altitude", self)
class Vehicle(Model):
def __init__(self, name, parent):
super().__init__(parent)
self.name = name
self.Speed = DataPointFloat("Speed", self)
self.CurrentLocation = CurrentLocation("CurrentLocation", self)
self.Cabin = Cabin("Cabin", self)
vehicle = Vehicle("Vehicle")#include "sdk/DataPoint.h"
#include "sdk/Model.h"
using namespace velocitas;
class Seat : public Model {
public:
Seat(std::string name, Model* parent)
: Model(name, parent) {}
DataPointBoolean Position{"Position", this};
DataPointBoolean IsOccupied{"IsOccupied", this};
DataPointBoolean IsBelted{"IsBelted", this};
DataPointInt32 Height{"Height", this};
DataPointInt32 Recline{"Recline", this};
};
class CurrentLocation : public Model {
public:
CurrentLocation(Model* parent)
: Model("CurrentLocation", parent) {}
DataPointDouble Latitude{"Latitude", this};
DataPointDouble Longitude{"Longitude", this};
DataPointString Timestamp{"Timestamp", this};
DataPointDouble Altitude{"Altitude", this};
};
class Cabin : public Model {
public:
class SeatCollection : public Model {
public:
class RowType : public Model {
public:
using Model::Model;
Seat Pos1{"Pos1", this};
Seat Pos2{"Pos2", this};
};
SeatCollection(Model* parent)
: Model("Seat", parent) {}
RowType Row1{"Row1", this};
RowType Row2{"Row2", this};
};
Cabin(Model* parent)
: Model("Cabin", parent) {}
DataPointInt32 DriverPosition{"DriverPosition", this};
SeatCollection Seat{this};
};
class Vehicle : public Model {
public:
Vehicle()
: Model("Vehicle") {}
DataPointFloat Speed{"Speed", this};
::CurrentLocation CurrentLocation{this};
::Cabin Cabin{this};
};Middleware integration
gRPC Services
Vehicle Services are expected to expose their public endpoints over the gRPC protocol. The related protobuf definitions are used to generate method stubs for the Vehicle Model to make it possible to call the methods of the Vehicle Services.
Model integration
Info
Please be aware that the integration of Vehicle Services into the overall model is not supported by
automated model lifecycle , currently.
Based on the .proto files of the Vehicle Services, the protocol buffer compiler generates descriptors for all rpcs, messages, fields etc. for the target language.
The gRPC stubs are wrapped by a convenience layer class derived from Service that contains all the methods of the underlying protocol buffer specification.
Info
The convenience layer of C++ is a bit more extensive than in Python. The complexity of gRPC’s async API is hidden behind individualAsyncGrpcFacade implementations which need to be implemented manually. Have a look at the SeatService of the SeatAdjusterApp example and its SeatServiceAsyncGrpcFacade.
class SeatService(Service):
def __init__(self):
super().__init__()
self._stub = SeatsStub(self.channel)
async def Move(self, seat: Seat):
response = await self._stub.Move(
MoveRequest(seat=seat), metadata=self.metadata
)
return responseclass SeatService : public Service {
public:
// nested classes/structs omitted
SeatService(Model* parent)
: Service("SeatService", parent)
, m_asyncGrpcFacade(grpc::CreateChannel("localhost:50051", grpc::InsecureChannelCredentials()))
{
}
AsyncResultPtr_t<VoidResult> move(Seat seat)
{
auto asyncResult = std::make_shared<AsyncResult<VoidResult>>();
m_asyncGrpcFacade->Move(
toGrpcSeat(seat),
[asyncResult](const auto& reply){ asyncResult->insertResult(VoidResult{})}),
[asyncResult](const auto& status){ asyncResult->insertError(toInternalStatus(status))};
return asyncResult;
}
private:
std::shared_ptr<SeatServiceAsyncGrpcFacade> m_asyncGrpcFacade;
};Fluent query & rule construction
A set of query methods like get(), where(), join() etc. are provided through the Model and DataPoint base classes. These functions make it possible to construct SQL-like queries and subscriptions in a fluent language, which are then transmitted through the gRPC interface to the KUKSA Databroker.
Query examples
The following examples show you how to query data points.
Get single data point
driver_pos: int = vehicle.Cabin.DriverPosition.get()
# Call to broker
# GetDataPoint(rule="SELECT Vehicle.Cabin.DriverPosition")auto driverPos = getDataPoints({Vehicle.Cabin.DriverPosition})->await();
// Call to broker:
// GetDataPoint(rule="SELECT Vehicle.Cabin.DriverPosition")
Get data points from multiple branches
vehicle_data = vehicle.CurrentLocation.Latitude.join(
vehicle.CurrentLocation.Longitude).get()
print(f'
Latitude: {vehicle_data.CurrentLocation.Latitude}
Longitude: {vehicle_data.CurrentLocation.Longitude}
')
# Call to broker
# GetDataPoint(rule="SELECT Vehicle.CurrentLocation.Latitude, CurrentLocation.Longitude") auto datapoints =
getDataPoints({Vehicle.CurrentLocation.Latitude, Vehicle.CurrentLocation.Longitude})->await();
// Call to broker:
// GetDataPoint(rule="SELECT Vehicle.CurrentLocation.Latitude, CurrentLocation.Longitude")
Subscription examples
Subscribe and Unsubscribe to a single data point
self.rule = (
await self.vehicle.Cabin.Seat.Row(2).Pos(1).Position
.subscribe(self.on_seat_position_change)
)
def on_seat_position_change(self, data: DataPointReply):
position = data.get(self.vehicle.Cabin.Seat.Row2.Pos1.Position).value
print(f'Seat position changed to {position}')
# Call to broker
# Subscribe(rule="SELECT Vehicle.Cabin.Seat.Row2.Pos1.Position")
# If needed, the subscription can be stopped like this
await self.rule.subscription.unsubscribe()auto subscription =
subscribeDataPoints(
velocitas::QueryBuilder::select(Vehicle.Cabin.Seat.Row(2).Pos(1).Position).build())
->onItem(
[this](auto&& item) { onSeatPositionChanged(std::forward<decltype(item)>(item)); });
// If needed, the subscription can be stopped like this:
subscription->cancel();
void onSeatPositionChanged(const DataPointMap_t datapoints) {
logger().info("SeatPosition has changed to: "+ datapoints.at(Vehicle.Cabin.Seat.Row(2).Pos(1).Position)->asFloat().get());
}Subscribe to a single data point with a filter
Vehicle.Cabin.Seat.Row(2).Pos(1).Position.where(
"Cabin.Seat.Row2.Pos1.Position > 50")
.subscribe(on_seat_position_change)
def on_seat_position_change(data: DataPointReply):
position = data.get(Vehicle.Cabin.Seat.Row2.Pos1.Position).value
print(f'Seat position changed to {position}')
# Call to broker
# Subscribe(rule="SELECT Vehicle.Cabin.Seat.Row2.Pos1.Position WHERE Vehicle.Cabin.Seat.Row2.Pos1.Position > 50")auto query = QueryBuilder::select(Vehicle.Cabin.Seat.Row(2).Pos(1).Position)
.where(vehicle.Cabin.Seat.Row(2).Pos(1).Position)
.gt(50)
.build();
subscribeDataPoints(query)->onItem([this](auto&& item){onSeatPositionChanged(std::forward<decltype(item)>(item));}));
void onSeatPositionChanged(const DataPointMap_t datapoints) {
logger().info("SeatPosition has changed to: "+ datapoints.at(Vehicle.Cabin.Seat.Row(2).Pos(1).Position)->asFloat().get());
}
// Call to broker:
// Subscribe(rule="SELECT Vehicle.Cabin.Seat.Row2.Pos1.Position WHERE Vehicle.Cabin.Seat.Row2.Pos1.Position > 50")
Publish & subscribe messaging
The SDK supports publishing messages to a MQTT broker and subscribing to topics of a MQTT broker. Using the Velocitas SDK, the low-level MQTT communication is abstracted away from the Vehicle App developer. Especially the physical address and port of the MQTT broker is no longer configured in the Vehicle App itself, but rather is set as an environment variable, which is outside of the Vehicle App.
Publish MQTT Messages
MQTT messages can be published easily with the publish_event() method, inherited from VehicleApp base class:
await self.publish_event(
"seatadjuster/currentPosition", json.dumps(req_data))publishToTopic("seatadjuster/currentPosition", "{ \"position\": 40 }");Subscribe to MQTT Topics
In Python subscriptions to MQTT topics can be easily established with the subscribe_topic() annotation. The annotation needs to be applied to a method of the VehicleApp base class. In C++ the subscribeToTopic() method has to be called. Callbacks for onItem and onError can be set. The following examples provide some more details.
@subscribe_topic("seatadjuster/setPosition/request")
async def on_set_position_request_received(self, data: str) -> None:
data = json.loads(data)
logger.info("Set Position Request received: data=%s", data)#include <fmt/core.h>
#include <nlohmann/json.hpp>
subscribeToTopic("seatadjuster/setPosition/request")->onItem([this](auto&& item){
const auto jsonData = nlohmann::json::parse(item);
logger().info(fmt::format("Set Position Request received: data={}", jsonData));
});Vehicle App abstraction
Vehicle Apps are inherited from the VehicleApp base class. This enables the Vehicle App to use the Publish & Subscribe messaging and to connect to the KUKSA Databroker.
The Vehicle Model instance is passed to the constructor of the VehicleApp class and should be stored in a member variable (e.g. self.vehicle for Python, std::shared_ptr<Vehicle> m_vehicle; for C++), to be used by all methods within the application.
Finally, the run() method of the VehicleApp class is called to start the Vehicle App and register all MQTT topic and Databroker subscriptions.
Implementation detail
In Python, the subscriptions are based onasyncio, which makes it necessary to call the run() method with an active asyncio event_loop.
A typical skeleton of a Vehicle App looks like this:
class SeatAdjusterApp(VehicleApp):
def __init__(self, vehicle: Vehicle):
super().__init__()
self.vehicle = vehicle
async def main():
# Main function
logger.info("Starting seat adjuster app...")
seat_adjuster_app = SeatAdjusterApp(vehicle)
await seat_adjuster_app.run()
LOOP = asyncio.get_event_loop()
LOOP.add_signal_handler(signal.SIGTERM, LOOP.stop)
LOOP.run_until_complete(main())
LOOP.close()#include "sdk/VehicleApp.h"
#include "vehicle/Vehicle.hpp"
using namespace velocitas;
class SeatAdjusterApp : public VehicleApp {
public:
SeatAdjusterApp()
: VehicleApp(IVehicleDataBrokerClient::createInstance("vehicledatabroker")),
IPubSubClient::createInstance("localhost:1883", "SeatAdjusterApp"))
{}
private:
::Vehicle Vehicle;
};
int main(int argc, char** argv) {
SeatAdjusterApp app;
app.run();
return 0;
}Further information
- Tutorial: Quickstart
- Tutorial: Vehicle Model Creation
- Tutorial: Vehicle App Development
- Tutorial: Develop and run integration tests for a Vehicle App