2025 Christmas Release of Eclipse MOSAIC
The special Christmas release of Eclipse MOSAIC is here! 🎄 The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 25.2 to the open source community. The release brings built-in support for your DRT (Demand Responsive Traffic) simulation needs.
2025 Autumn Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 25.1 to the open source community. The new version finally introduces detailed full-stack simulation of cellular communication in ns-3, starting with the LTE C-V2X stack.
2025 Spring Release of Eclipse MOSAIC
The spring release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 25.0 to the open source community. This new version comes with an improved Application API, new components towards multi-modality, an extended 2D visualization, as well as usability improvements for the communication simulators OMNeT++ and ns-3 .


From Simulation to Innovation: Transforming Mobility with Eclipse MOSAIC
Eclipse MOSAIC is a cutting-edge simulation framework that facilitates innovation in connected and automated mobility. This multi-domain and multi-scale tool empowers you to tackle complex mobility challenges with precision and efficiency.
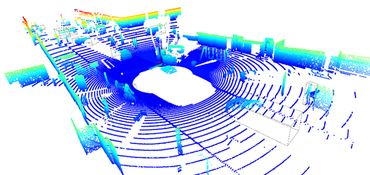
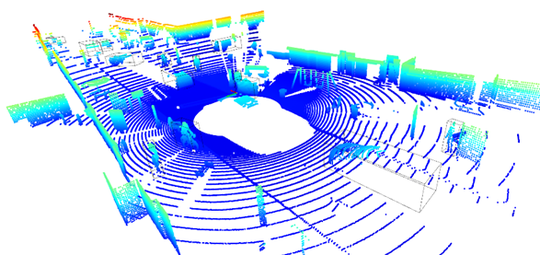
Publication of the LUCID Dataset
We are excited to announce the release of the LUCID Dataset, a novel synthetic street-view LiDAR dataset designed to advance computer vision and object detection in the automated driving domain. Comprising 100 scenarios with approximately 1.1 hours of drive time, 40,000 frames, and 500,000 bounding boxes, the LUCID Dataset is a significant resource for researchers and developers.


2024 Autumn Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC is here! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 24.1 to the open source community. This release concentrates less on new features, but on improving documentation and tutorials.


AI-NET-ANTILLAS - Perception for Remote Operated Driving
After four years of research, the AI-NET-ANTILLAS project has concluded, and the final event took place in conjunction with the Berlin 6G Conference 2024. Collaborating with our partners, we integrated several key components: Cloud-based LIDAR processing, next generation networks, and artificial intelligence, to create a new service and application platform.

2024 Spring Release of Eclipse MOSAIC
The spring release of Eclipse MOSAIC has arrived! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 24.0 to the open source community. This new version comes with an updated routing library and improved simulation of cellular communication.


Simulated Testing of Traffic State Estimation using Eclipse MOSAIC
Daily commutes can quickly turn into stressful affairs when overcrowded roads become congested and what would be a 20 minute ride becomes an hour of staring at the license plate of your fellow comrade-in-traffic. Real-time Traffic State Estimation (TSE) aims to alleviate this strain by predicatively recognizing congested areas and offering alternative routing options. In a recent publication we established a framework for easy implementation and evaluation of novel TSE systems.


2023 Autumn Release of Eclipse MOSAIC
The autumn release of Eclipse MOSAIC has arrived! The committer team from Fraunhofer FOKUS and DCAITI is proud to present Eclipse MOSAIC 23.1 to the open source community. This new version brings the perception facilities in the Application simulator to a stable state and comes with improvements across several integrated MOSAIC models.