Action States
Longitudinal Action States
Determination of the current leading vehicle for longitudinal guidance
The determination takes place in two steps: First, all AOIs are determined which might contain the leading vehicle. Secondly, the current leading vehicle is selected from the list that was created in the first step. This process is only performed if the current microscopic or mesoscopic situation or the current lateral action state has changed. Possible AOIs considered for the current leading vehicle depend on the current lateral action state:
Lane change: AOIs ahead of ego in the current lane and the lane that is being changed into are considered.
Merging: AOIs directly ahead of ego in the current lane and the AOI used as MergeRegulate are considered.
Otherwise: AOIs ahead of ego in the current lane are considered.
Among the possible AOIs that contain observed vehicles, the one with the lowest TTC is selected. If no TTC is available, the logic first defaults to the smallest time gap and failing that, the shortest logitudinal distance.
Determination process for the longitudinal action state
The decision tree of the longitudinal action state is shown as following.
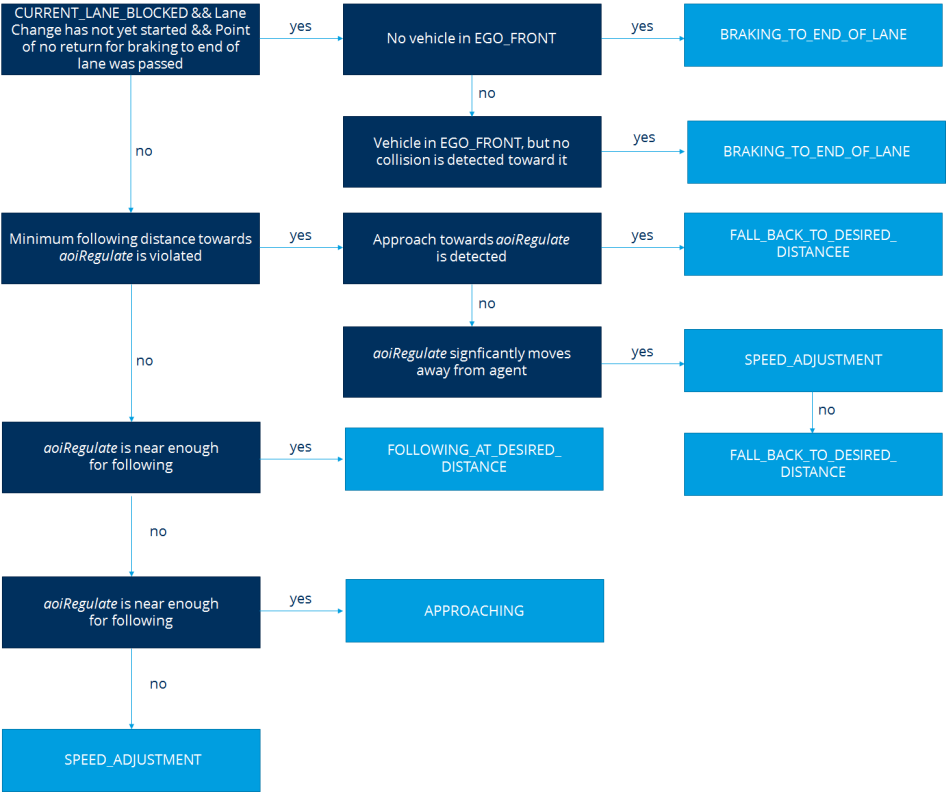
Fig. 22 Decision tree for the longitudinal action state
Lateral Action States
Determination process for the lateral action state
In this chapter, the decision possibilities regarding LateralActionState for each individual situation are presented in the form of decision trees.
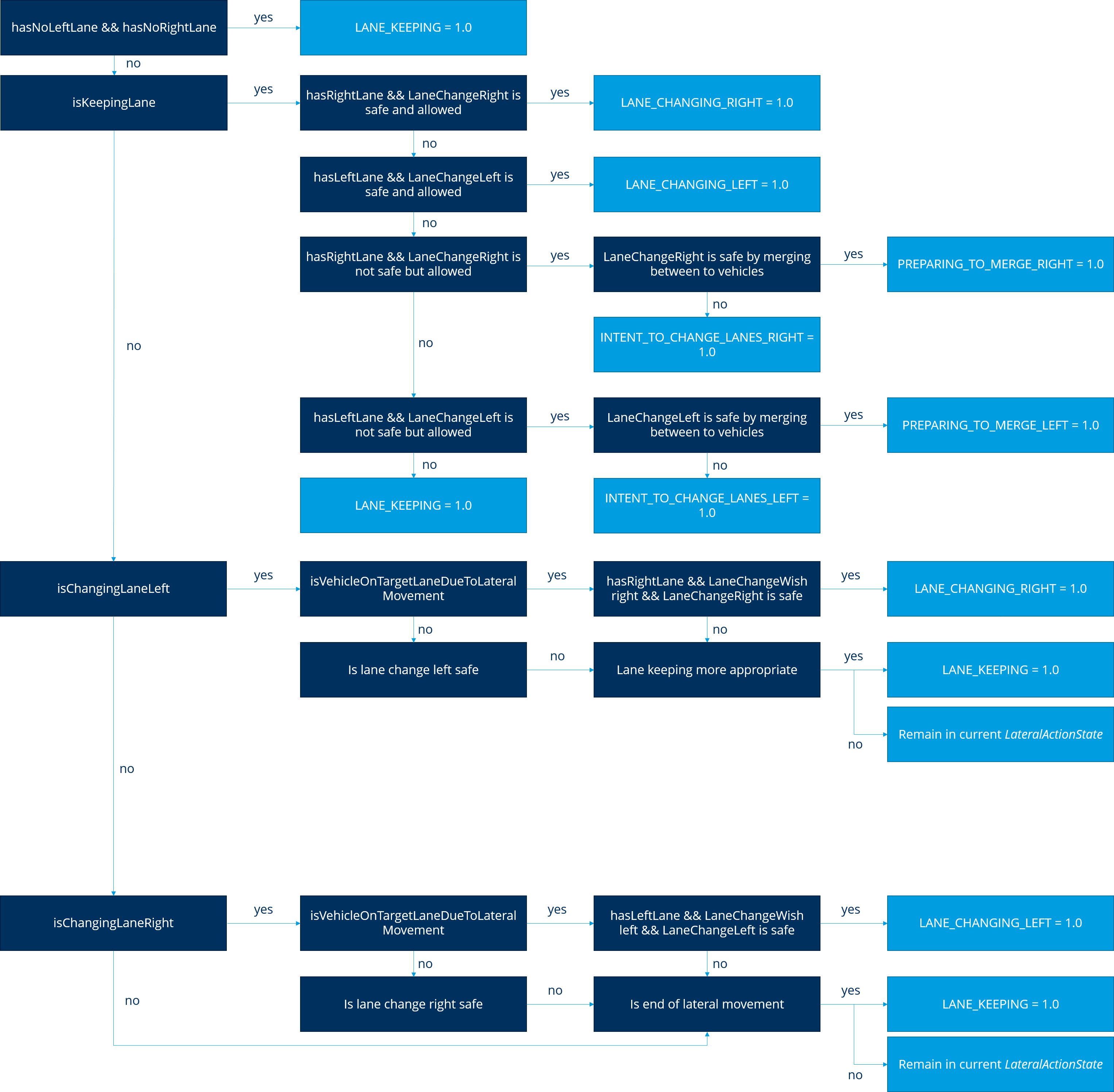
Fig. 23 Decision tree for the situation CURRENT_LANE_BLOCKED
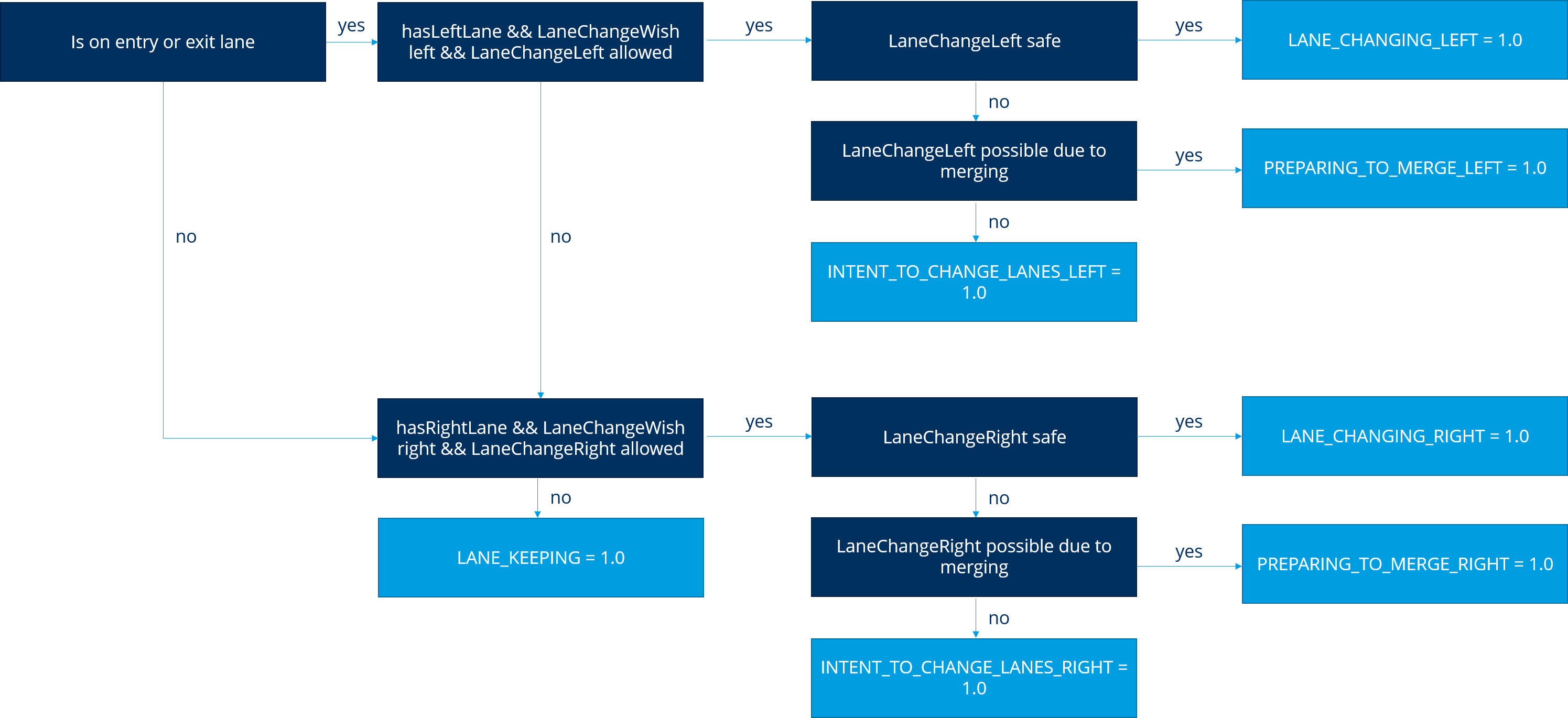
Fig. 24 Decision tree for the situation FREE_DRIVING
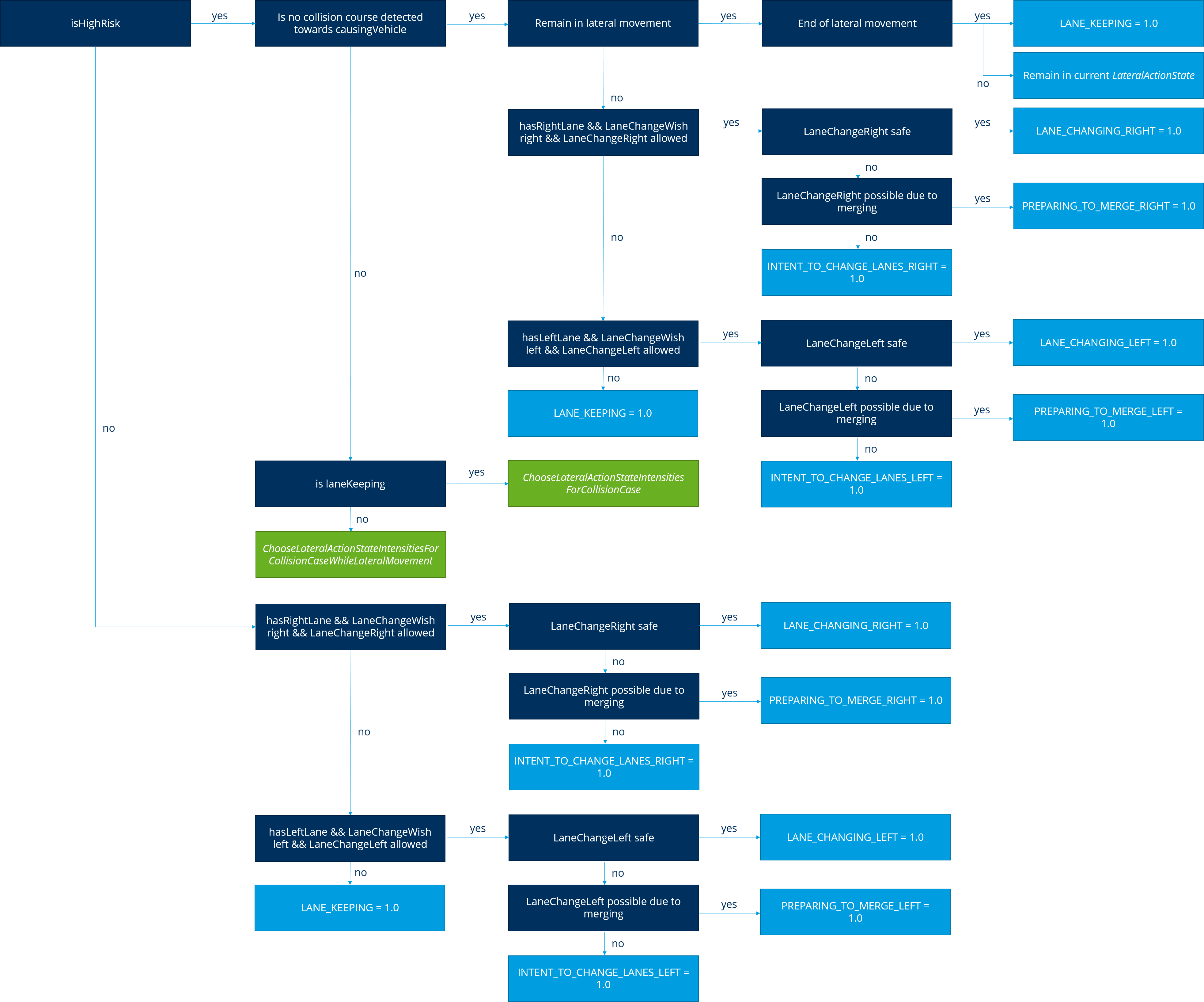
Fig. 25 Decision tree for the situation FOLLOWING_DRIVING
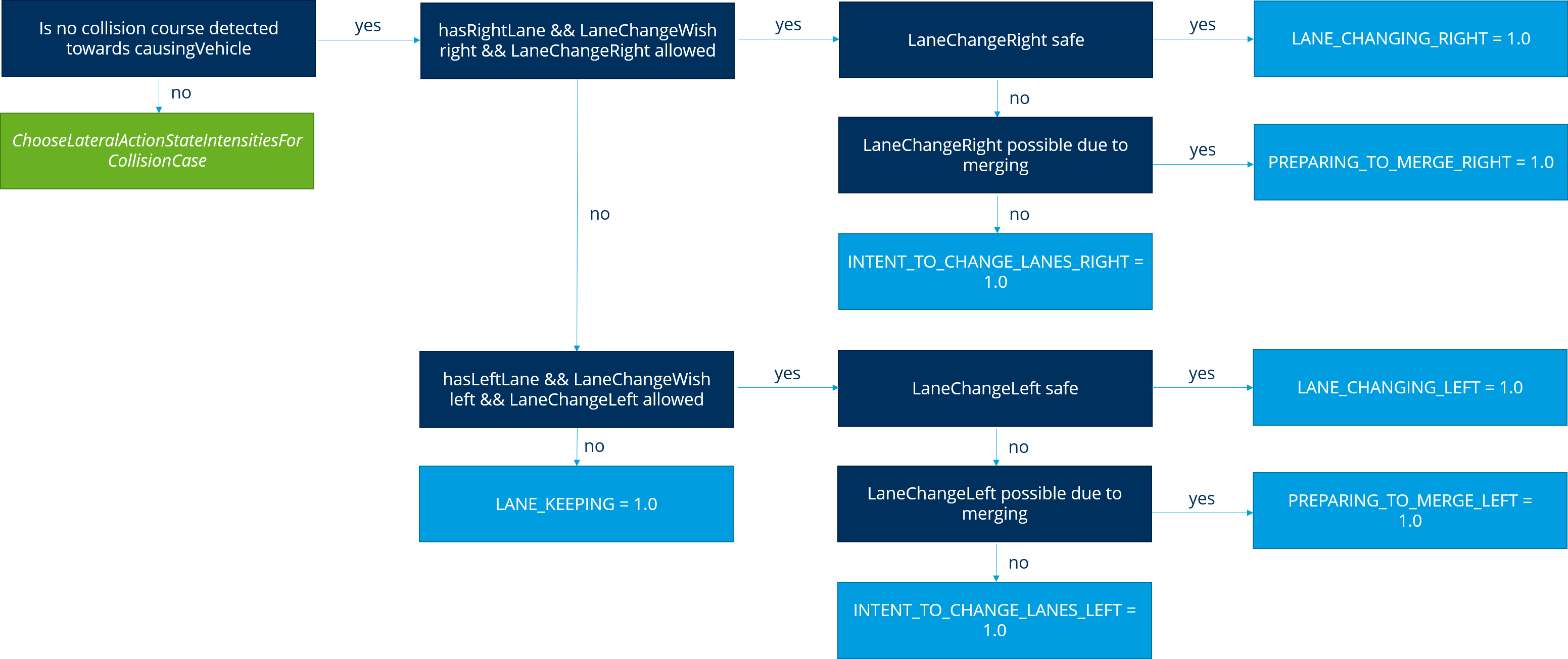
Fig. 26 Decision tree for the situation OBSTACLE_ON_CURRENT_LANE
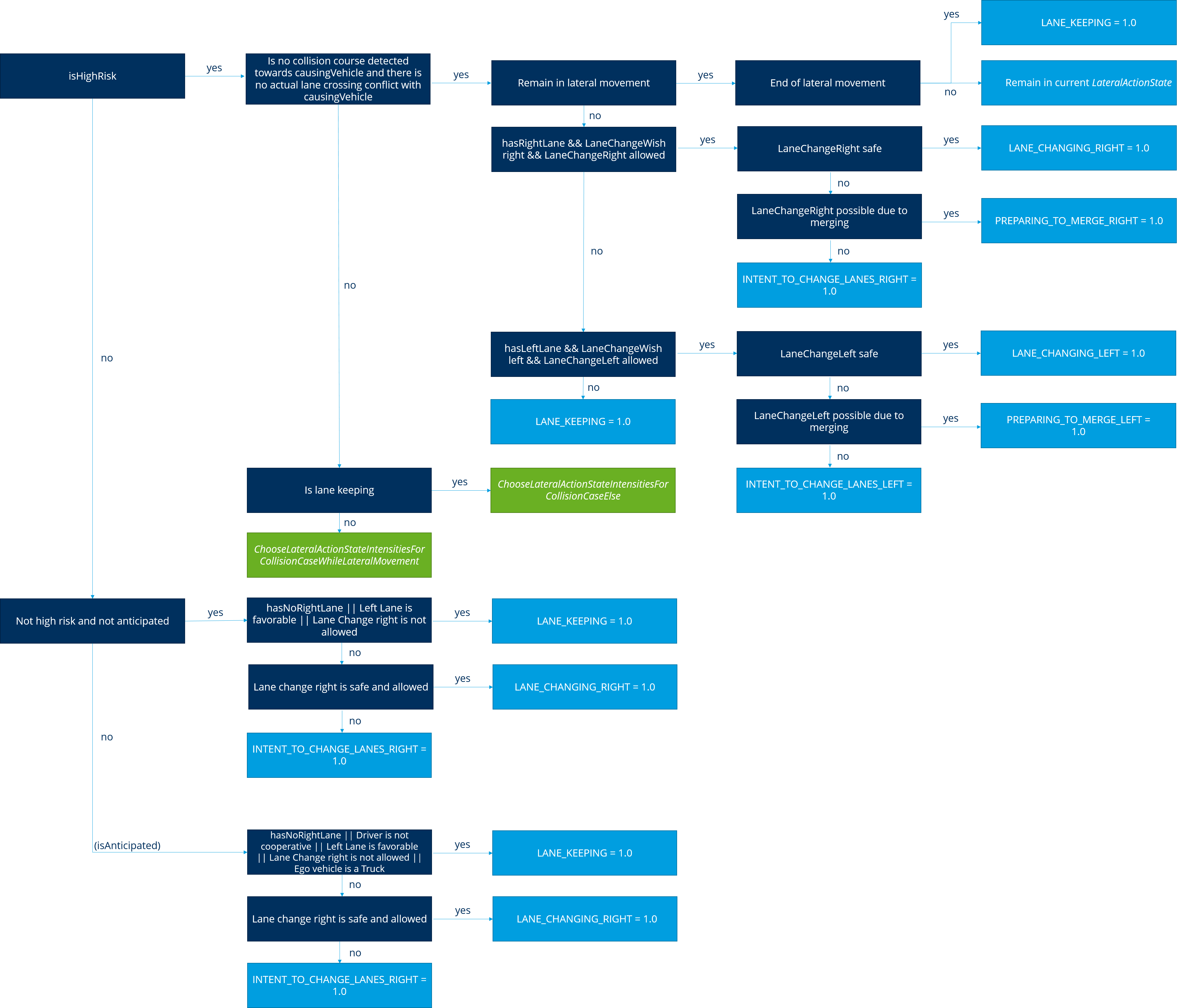
Fig. 27 Decision tree for the situation LANE_CHANGER_FROM_LEFT
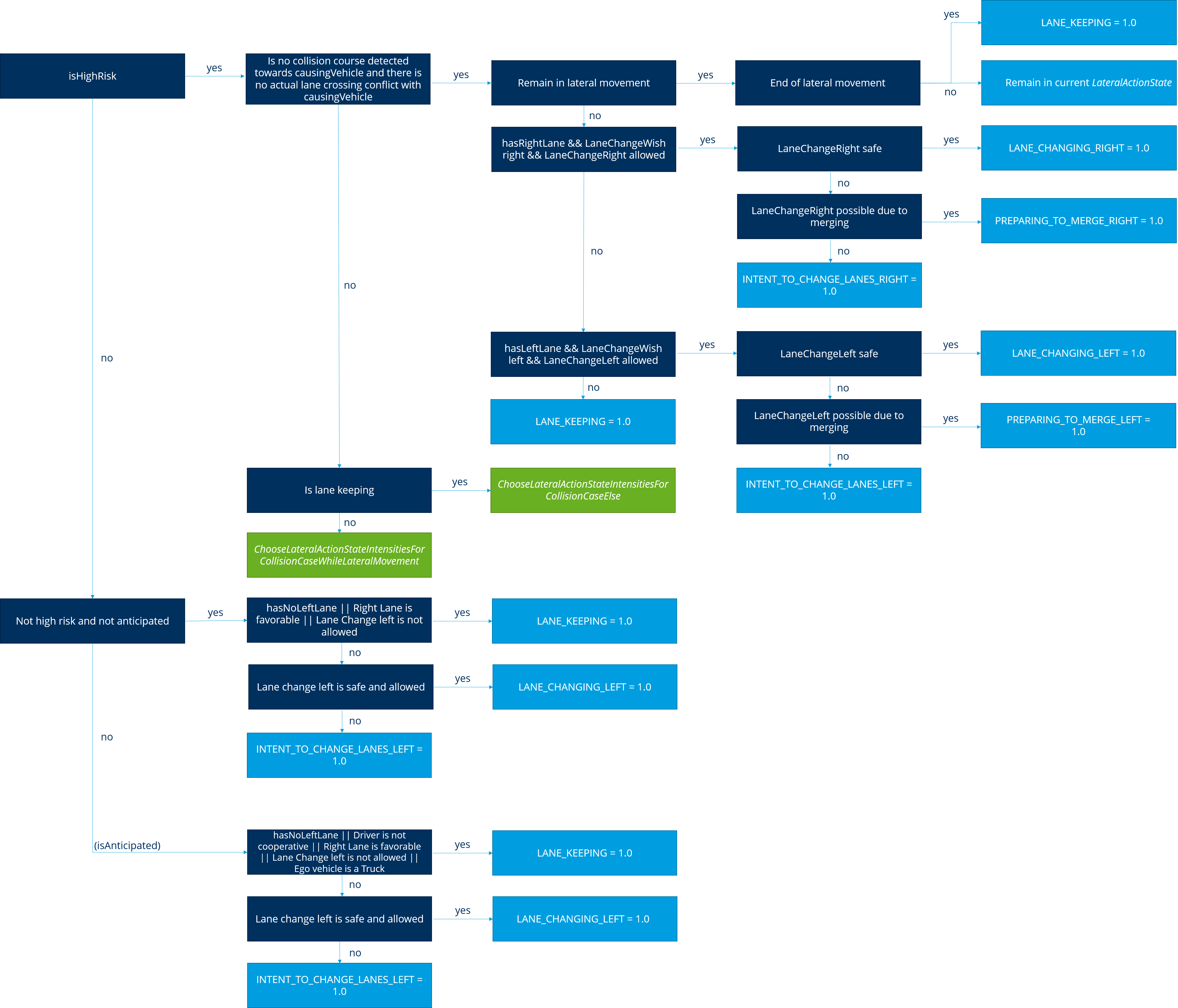
Fig. 28 Decision tree for the situation LANE_CHANGER_FROM_RIGHT
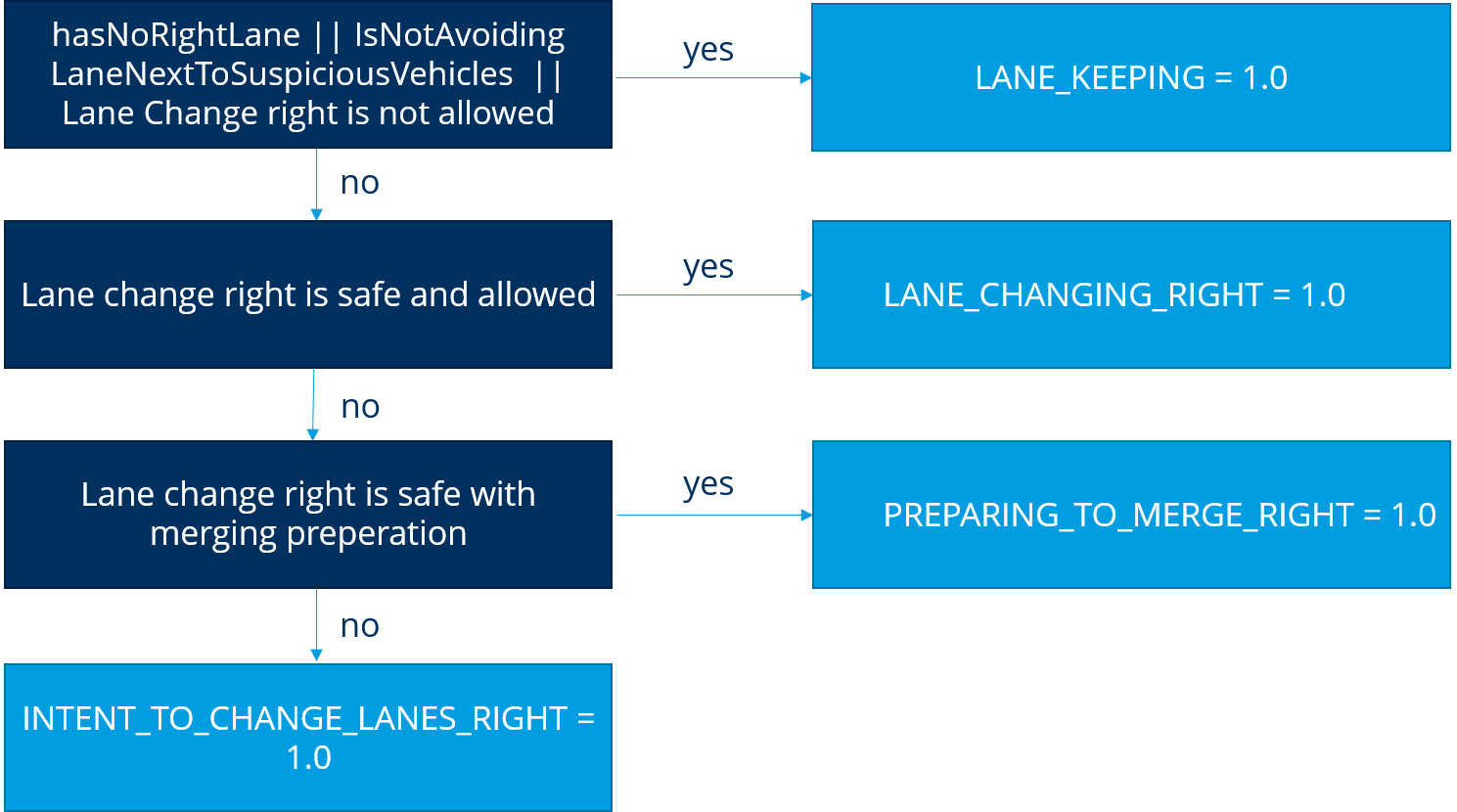
Fig. 29 Decision tree for the situation SUSPICIOUS_OBJECT_IN_LEFT_LANE
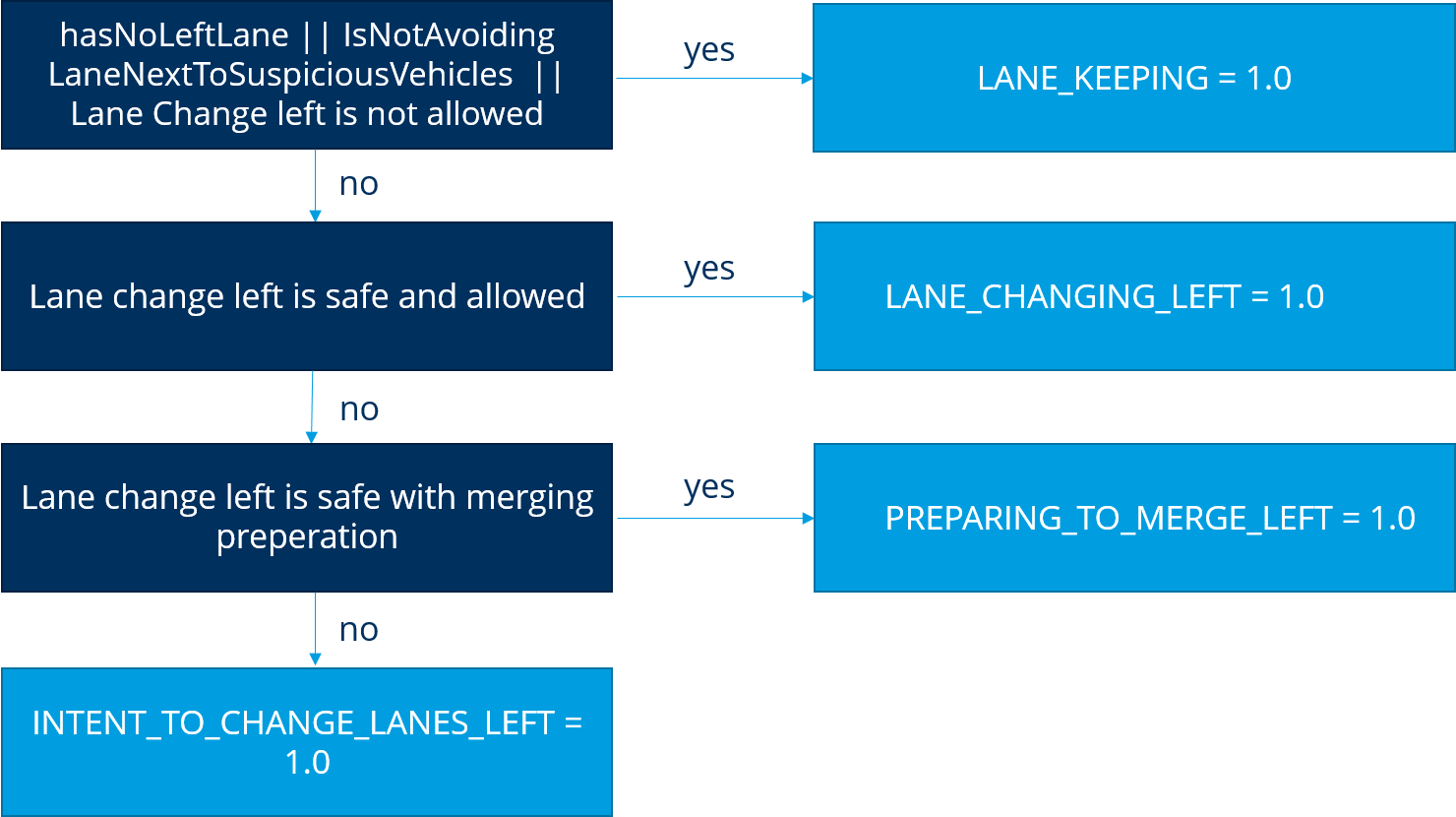
Fig. 30 Decision tree for the situation SUSPICIOUS_OBJECT_IN_RIGHT_LANE
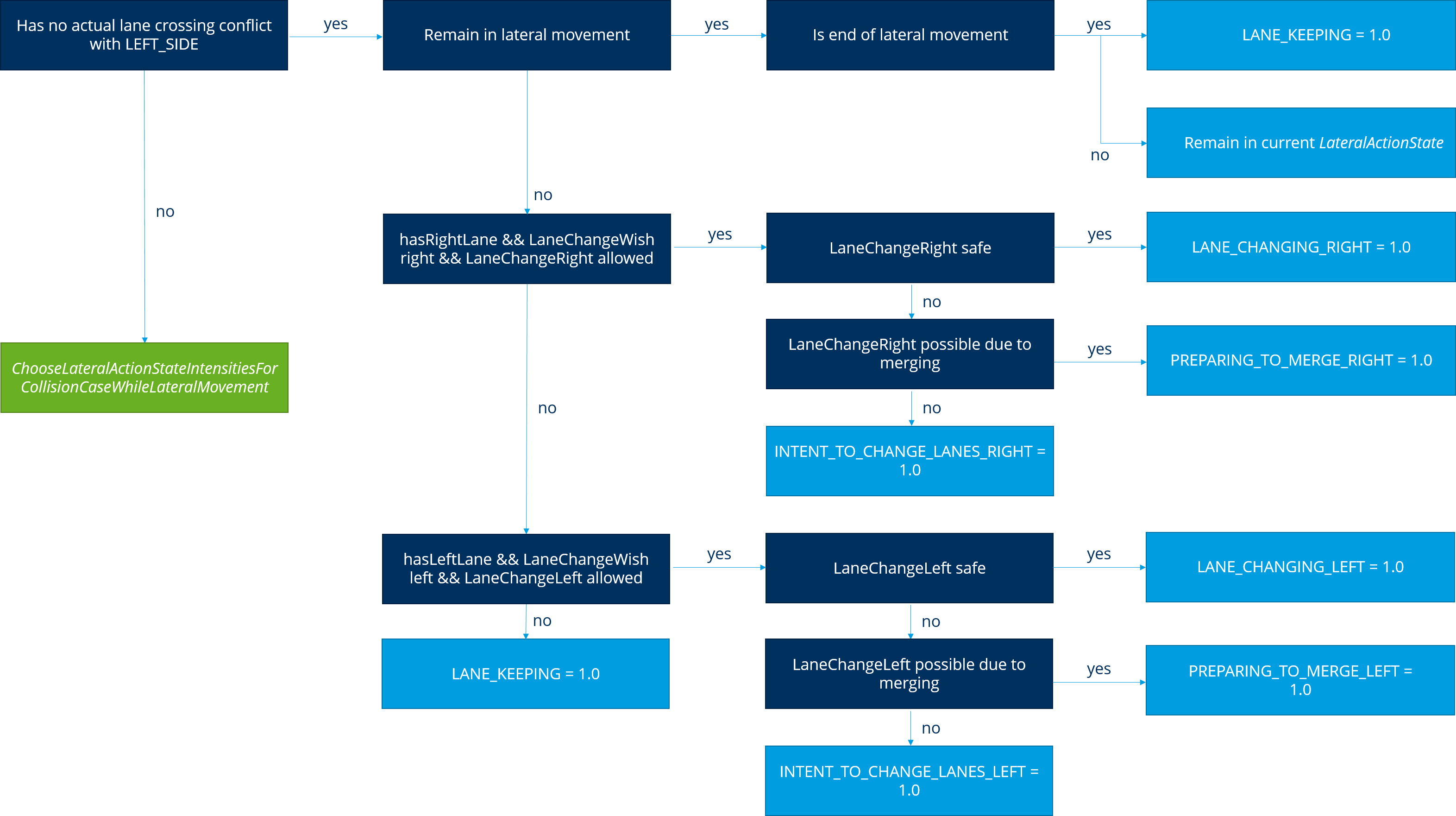
Fig. 31 Decision tree for the situation SIDE_COLLISION_RISK_FROM_LEFT
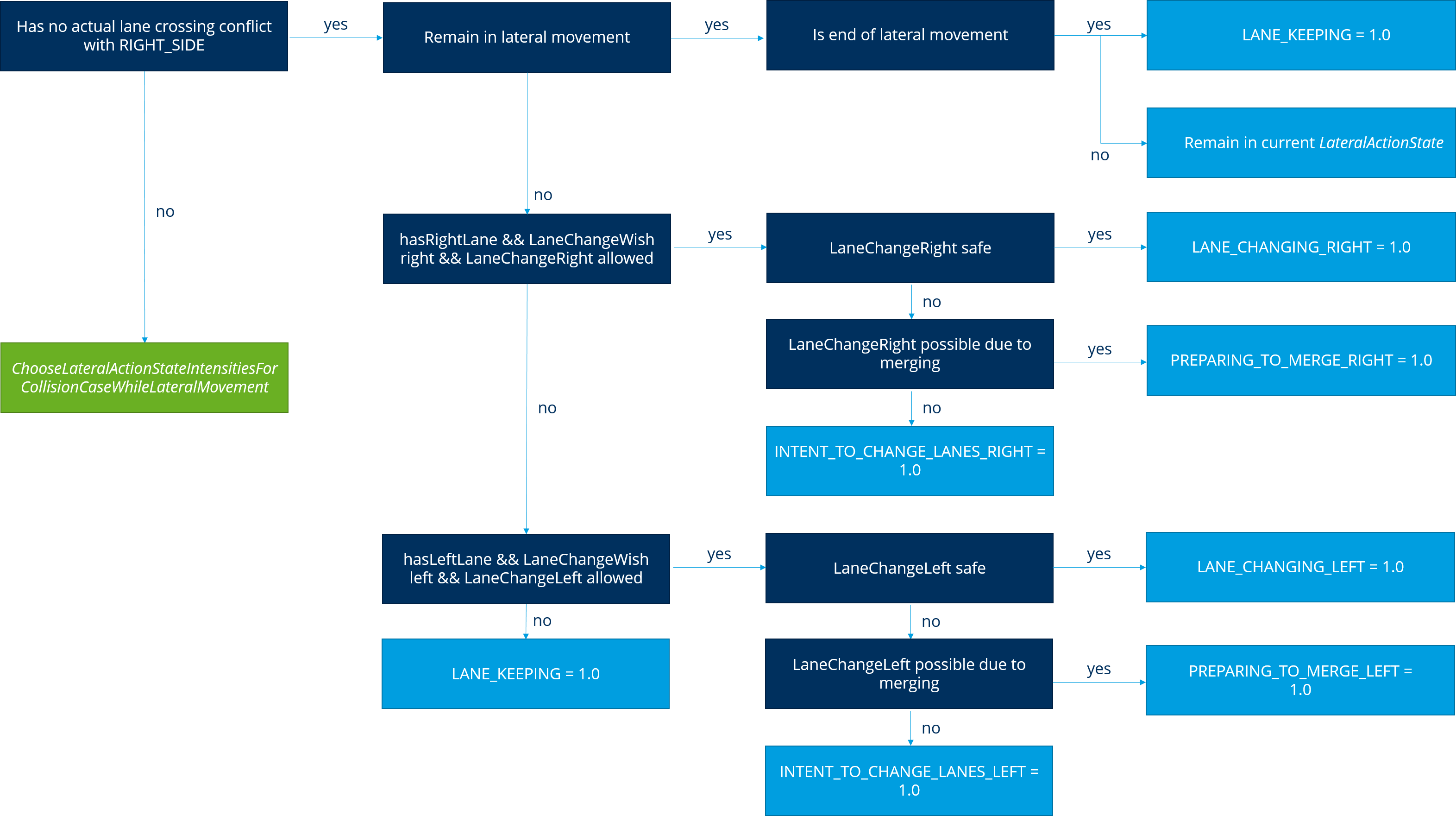
Fig. 32 Decision tree for the situation SIDE_COLLISION_RISK_FROM_RIGHT
In case of a collision, the current lateral action state is simply maintained.