High Cognitive
High Cognitive constitutes an alternative algorithm for the anticipation of lane changing vehicles from the adjacent right lane due to a slower vehicle in front of them. It was developed by Philipp Ring in his PhD thesis (Modellierung kognitiver Prozesse für ein numerisches Fahrerverhaltensmodell, 2020, Technische Universität Dresden) and provides a complex anticipation mechanism which is based on real world driving data on motorways taken from a field operational test and a human subject study. The algorithm can be activated by setting the parameter EnableHighCognitiveMode of the corresponding driver profile in the ProfilesCatalog to “true”. It is set “false” per default due to a higher resource demand. It is then used for the evaluation of situations instead of SCM’s standard mechanism. Fig. 21 illustrates the traffic situation addressed by the algorithm and all of its relevant state variables.
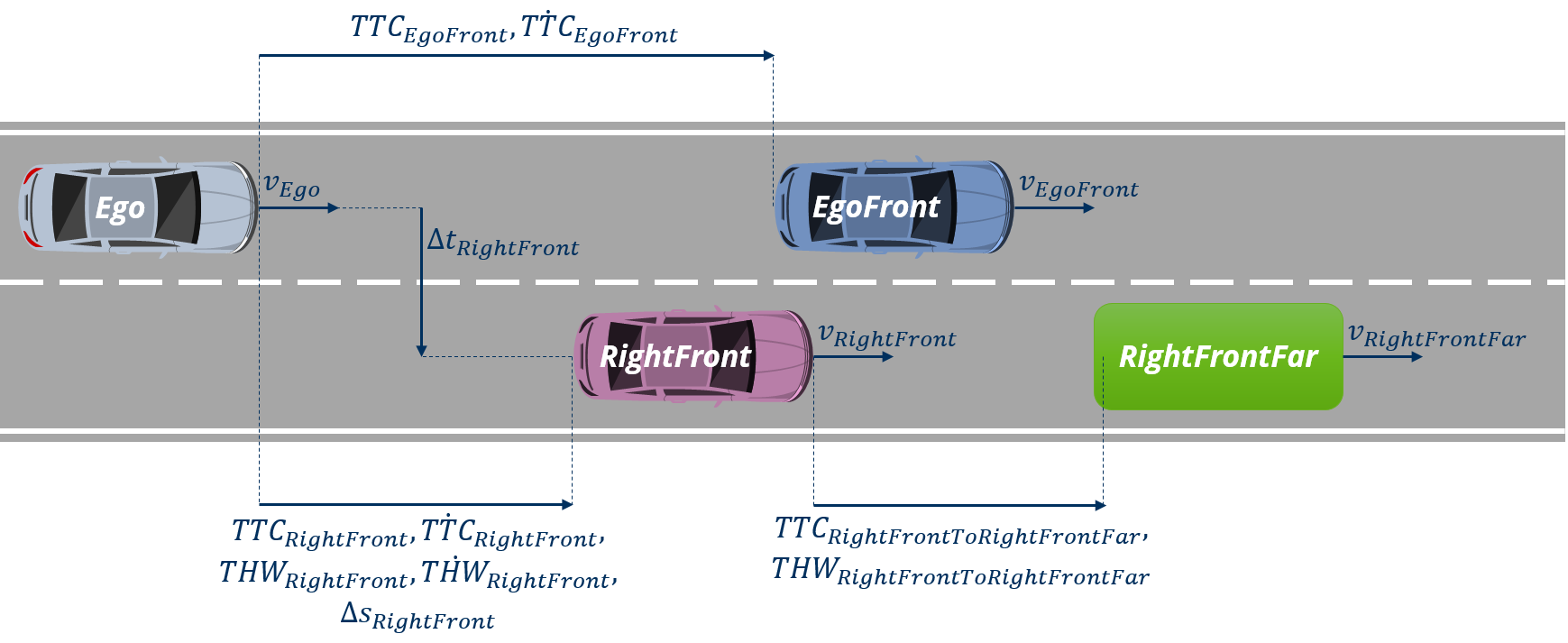
Fig. 21 HighCognitive - Traffic situation and relevant state variables (TTC - time to collision; THW - time headway)
The presence of a vehicle EgoFront is not necessary for the algorithm, but it will influence the anticipation of the lane change probability of the vehicle RightFront.
Furthermore, RightFrontFar has not necessarily to be a moving vehicle; it can also be a stationary object  .
Similarly to the SCM standard mechanism, HighCognitive provides the detection of the situation pattern and the calculation of its intensity, which will be explained in more detail subsequently.
.
Similarly to the SCM standard mechanism, HighCognitive provides the detection of the situation pattern and the calculation of its intensity, which will be explained in more detail subsequently.
Situation pattern detection
Prerequisites for the situation pattern evaluation are the following:
a vehicle RightFront and a vehicle or object RightFrontFar must be present
the ego-vehicle must approach the vehicle RightFront an the approach must be visually perceivable

The situation pattern detection of High Cognitive extends the usual situation pattern Anticipated lane changer from right into a 2-by-2 sub-pattern.
First of all, there is a distinction between a following and an approaching relation among RightFront and RightFrontFar.
Following means, there is no relative movement perceivable between the two objects  .
Approaching means, RightFront is getting closer to RightFrontFar and the movement is perceivable
.
Approaching means, RightFront is getting closer to RightFrontFar and the movement is perceivable  .
Therefore, the situation pattern detection of HighCognitive is not triggered, if RightFrontFar is faster than RightFront
.
Therefore, the situation pattern detection of HighCognitive is not triggered, if RightFrontFar is faster than RightFront  .
.
The second dimension concerns the saliency of the situation, which is expressed by the time headway (THW) between RightFront and RightFrontFar.
A salient approaching or following is detected, if  is smaller or equal to the minimum following distance.
Otherwise, it is categorized as a normal situation.
is smaller or equal to the minimum following distance.
Otherwise, it is categorized as a normal situation.
These definitions were used by Ring to label situations from a human subject study in real world motorway traffic, which served as training data for the HighCognitive situation pattern detection algorithm.
The algorithm consists of three decision tree classifiers: ApproachFollowClassifier and subsequently ApproachSaliencyClassifier or FollowSaliencyClassifier.
They decide about the current situation pattern based on the inputs  and .
The output is averaged over the last 10 time steps for a more stable model behaviour.
and .
The output is averaged over the last 10 time steps for a more stable model behaviour.
Originally, the 2-by-2 sub-pattern distinction was solely used to influence the gaze behaviour of the agent, but this has become obsolete over the years due to a more complex control of visual attention, consisting of explicit bottom-up and top-down mechanisms. In the current version of SCM, the saliency aspect of the algorithm is used to potentially elevate the risk class of the current situation, i.e. it is always handled as a High risk situation if a Salient Approaching or a Salient Following is detected by High Cognitive (see Base intensity calculation).
Situation intensity calculation
The situation intensity (in case a High Cognitive situation pattern was detected) is expressed by two aspects within the HighCognitive module: Anticipation and Prediction.
The Anticipation model calculates the probability that the vehicle RightFront is actually going the change into the ego-vehicle’s lane.
It consists of a hybrid model using a Bayesian network and logistic regression.
The model inputs are  ,
,  ,
,  ,
,  , , and if a vehicle EgoFront is present, additionally
, , and if a vehicle EgoFront is present, additionally  and
and  .
The model output is a numeric value between 0 and 1, expressing the anticipated lane change probability of vehicle RightFront.
Ring extracted the empirical data for this model from a human subject study in real world motorway traffic.
.
The model output is a numeric value between 0 and 1, expressing the anticipated lane change probability of vehicle RightFront.
Ring extracted the empirical data for this model from a human subject study in real world motorway traffic.
The Prediction model calculates the probability of a collision between the vehicle RightFront and the ego-vehicle in case of RightFront is changing into the ego-vehicle’s lane and the ego-vehicle is continuing its current motion in an unaltered manner.
It consists of a Monte Carlo model using an array of real-world lane change trajectories taken from a field operational test.
The model inputs are  ,
,  , and
, and  .
The model output is a numeric value between 0 and 1, expressing the predicted collision probability between RightFront and the ego-vehicle.
.
The model output is a numeric value between 0 and 1, expressing the predicted collision probability between RightFront and the ego-vehicle.
Originally, the situation intensity was calculated by High Cognitive by simply multiplying the two probability values for Anticipation and Prediction. This changed when the current evaluation mechanism for situations was introduced which generally expresses situation intensity as the product of the probability for the occurrence of an event and the necessary severity of the ego-vehicle’s reaction to this event (e.g., preventing a collision by braking). In this case, the probability aspect is still the same, i.e. the probability of a lane change by RightFront, but the severity aspect is not compatible. Therefore, only the Anticipated probability from the HighCognitive module is still used in the situation intensity calculation and the severity aspect is always calculated by the standard SCM algorithm.