Communication in Applications
Eclipse MOSAIC has different classes, which allow you to define the network type and the specific area where the communication should occur. Communication can be achieved with external network simulators ( OMNeT++, ns-3) or one of the built-in communication simulators SNS or Eclipse MOSAIC Cell. Furthermore, for a better understanding it is important to consider the network types of Eclipse MOSAIC in more detail.
- Cellular Communication
- Ad-hoc Communication
Depending on the needs of the application, there are different approaches to solve the communication issue in Eclipse MOSAIC simulations. However, a distinction must be made between inter vehicle communication and Vehicle-to-X communication. Also, it is possible to modify the selected communication mode dependent on requirements.
Generally, the following modes are available based on network:
Cellular Communication
- Geobroadcast
- Geocast
- Topocast
Ad-hoc Communication
- Geobroadcast
- Geocast
- Topobroadcast
- Topocast
General Configuration
The first step to enable your application to use communication capabilities, is to make sure it extends the AbstractSimulationUnit-class
or one of its child-classes (e.g. VehicleUnit, ChargingStationUnit) found in package
org.eclipse.mosaic.fed.application.ambassador.simulation. Additionally, if you want your application to act upon
the reception or transmission of messages, make sure it implements the interface CommunicationApplication.
Afterwards, depending on your use case, you can enable the desired communication modules following the instruction in
Cellular Configuration and
Ad-hoc Configuration.
Cellular Communication
The cellular network is known from wireless mobile communication and the principle is to divide the entire geographic area into several smaller parts called “cells”. Each cell has a fixed-location transceiver with a coverage ratio.
Eclipse MOSAIC enables the communication with all the existing vehicles via Geobroadcast mode or direct communication via Geocast in a specific area (circular, rectangular). In contrast, the Topocast mode is not restricted to a specific area.
Cellular Configuration
To enable and configure the Cell-module in your application you have to call the enable-method of your applications Cell-module.
Typically, you will do this inside the onStartup()-method to enable cell capabilities from the get-go.
Below is an example configuration defining maximal uplink and downlink bit rates.
@Override
public void onStartup() {
getOs().getCellModule().enable(new CellModuleConfiguration()
.maxDownlinkBitrate(50 * DATA.MEGABIT)
.maxUplinkBitrate(50 * DATA.MEGABIT)
}
Cellular Geobroadcast
The principle function of the Geobroadcast is to communicate with all entities within a geographical area. Eclipse MOSAIC offers the possibility to configure a specific geographical area which can be either a circular or a rectangular area.
The following figure illustrates a vehicle veh_2 which is communicating with the other vehicles(veh_1, veh_3) within a radius R.
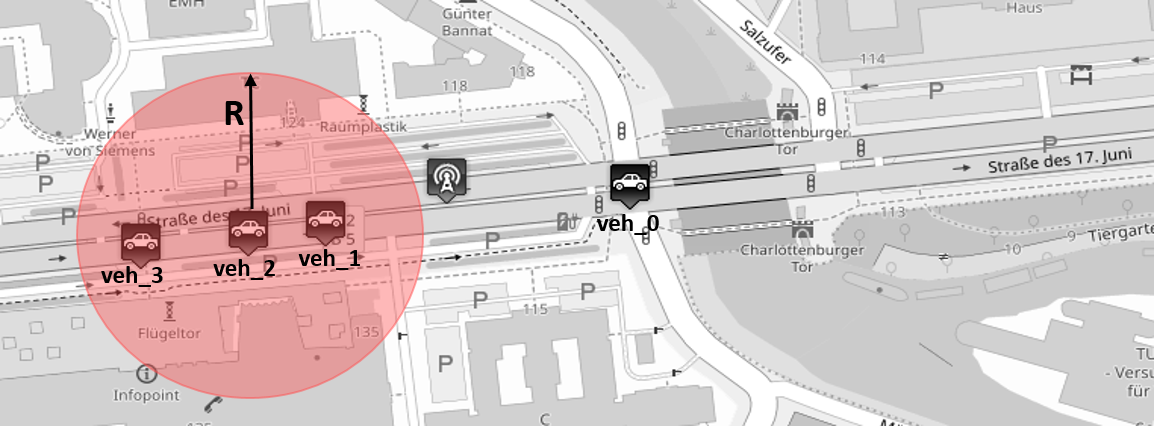
A circular communication area can be defined with the geoBroadCast(GeoCircle geoCircle) from an Eclipse MOSAIC application,
as shown below:
GeoCircle transmissionArea = new GeoCircle(GeoPoint.latlon(52.5, 13.2), 3000);
MessageRouting routing = getOs().getCellModule().createMessageRouting().geoBroadCast(transmissionArea);
getOs().getCellModule().sendV2XMessage(new MyV2XMessage(routing));
A rectangular destination area can be defined similarly:
GeoPoint pointA = GeoPoint.latlon(52.51355, 13.22000);
GeoPoint pointB = GeoPoint.latlon(52.52000, 13.21000);
GeoRectangle transmissionArea = new GeoRectangle(pointA, pointB);
MessageRouting routing = getOs().getCellModule().createMessageRouting().geoBroadCast(transmissionArea);
getOs().getCellModule().sendV2XMessage(new MyV2XMessage(routing));
Cellular Geocast
Compared to Geobroadcasting, a Geocast addresses a receiver with an unique address. Addressing can be in the form of an IP-Address or a receiver-ID (e.g. veh_0). Again, the communication area can be configured as circular or rectangular.
Assume, the veh_1 has a message which is addressed to veh_2. In order to send the message, veh_1 first examines whether the vehicle with ID veh_2 is located within the transmission area. If this is the case, the message will be transmitted. In figure below is this situation illustrated.

The following methods are provided for the configuring the transmission area (Circle or Rectangle) and the addressing to the receiver(hostname or ip address).
geoCast(GeoCircle geoCircle, String receiverName)geoCast(GeoRectangle geoRectangle, String receiverName)geoCast(GeoCircle geoCircle, byte[] ipAddress)geoCast(GeoRectangle geoRectangle, byte[] ipAddress)
GeoCircle transmissionArea = new GeoCircle( GeoPoint.latlon(52.5, 13.2), 3000);
String receiverName = "veh_0";
MessageRouting routing = getOs().getCellModule().createMessageRouting().geoCast(transmissionArea, receiverName);
getOs().getCellModule().sendV2XMessage(new MyV2XMessage(routing));
Cellular Topocast
Compared to Geocast or Geobroadcast, the Topocast is totally independent of geographical conditions and the addressing can be in the form of an IP-Address or a receiver-ID.
The next figure illustrates how the veh_0 is communicating with veh_1 in Topocast mode.
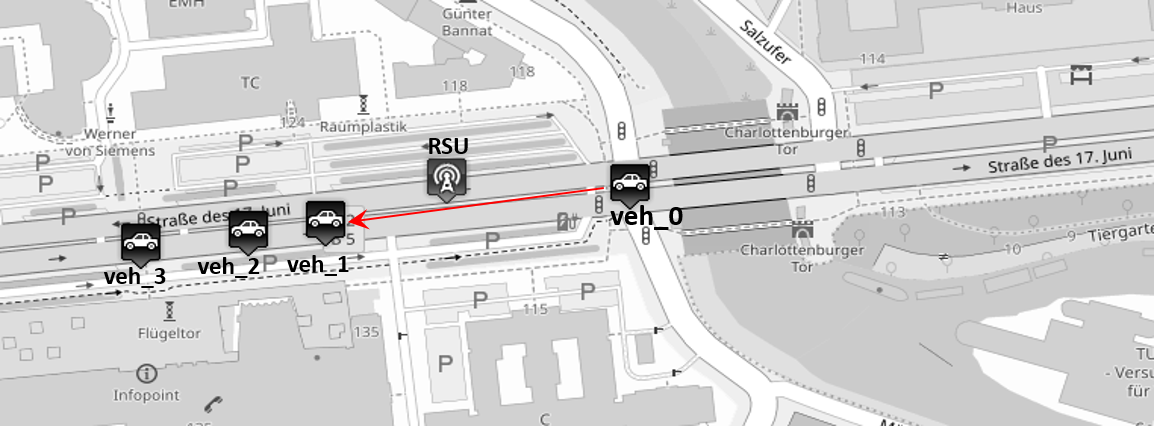
The code example below shows how we can configure the requirements of the communication in Topocast mode.
String receiverName = "veh_0";
MessageRouting routing = getOs().getCellModule().createMessageRouting().topoCast(receiverName);
getOs().getCellModule().sendV2XMessage(new MyV2XMessage(routing));
Setting Protocol Types
By default, all cell messages use UDP, however you can set the protocol using the protocol(...) method of the MessageRoutingBuilder:
String receiverName = "veh_0";
MessageRouting routing = getOs().getCellModule().createMessageRouting()
.protocol(Protocoltype.TCP)
.topoCast(receiverName);
getOs().getCellModule().sendV2XMessage(new MyV2XMessage(routing));
Ad-hoc Communication
The Ad-hoc network does not rely on a pre-existing infrastructure. Provided that vehicles are equipped with Ad-hoc modules, they are able to communicate with each other dynamically. In case of a sufficient number of Ad-hoc equipped vehicles, a message can be transferred via hops quickly over a long distance.
Eclipse MOSAIC also enables the communication via a specific Ad-hoc channel within the wireless Ad-hoc network. However, the Ad-hoc channels for vehicular communication are limited and standardized by the IEEE 802.11p. The licensed frequency band 5.9 GHz (5.85-5.925 GHz) for Intelligent Transportation Systems(ITS) will be used as Ad-hoc channels.
The following table shows the possible channels on the 5.9 GHz band used for V2X communication.
| Channel Number | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| Channel Name | SCH1 | SCH2 | SCH3 | CCH | SCH4 | SCH5 | SCH6 |
| Frequency Band | 5.86 | 5.87 | 5.88 | 5.89 | 5.9 | 5.91 | 5.92 |
Ad-hoc Configuration
Make sure you set up your application as described in
General Configuration.
Afterwards, to configure and enable the AdHoc-module in your application you have to call the enable-method of your applications'
Adhoc-module and define a configuration.
Usually you will do this in the onStartup()-method to enable the module from the get-go.
Below is an example configuration taken from the Tiergarten-tutorial. Instead of configuring the .power(...)[mW]
it is also possible to configure a .distance(...)[m].
@Override
public void onStartup() {
getOs().getAdHocModule().enable(new AdHocModuleConfiguration()
.addRadio()
.channel(AdHocChannel.CCH)
.power(50)
.create());
}
Ad-hoc Topobroadcast
In Topobroadcast mode, the communication between vehicles is regardless of the geographic conditions. However, the communicating entities must be operated on the same Ad-hoc channel and there are two options to use the Topobroadcast:
- Singlehop
- Multihop
Singlehop Approach in Topobroadcast
For Singlehop, it is not necessary to specify the number of hops explicitly which indicates the lifespan of a message,
because in Singlehop, any message has a lifespan of hop = 1. Moreover, Eclipse MOSAIC allows to use the default method
topoBroadCast() which automatically assigns a Control Channel (CCH) for the simulation entity and a lifespan based on
the Singlehop principle. Alternatively you can use the non-default method topoBroadCast(AdHocChannel) in order to
specify the Ad-hoc channel.
Below are some configuration examples of the default addressing method topoBroadCast() and non-default addressing
method topoBroadCast(AdHocChannel).
MessageRouting routing = getOs().getAdHocModule().createMessageRouting().topoBroadCast();
getOs().getAdHocModule().sendV2XMessage(new MyV2XMessage(routing));
AdHocChannel commonChannel = AdHocChannel.SCH1;
MessageRouting routing = getOs().getAdHocModule().createMessageRouting().topoBroadCast(commonChannel);
getOs().getAdHocModule().sendV2XMessage(new MyV2XMessage(routing));
The following figure shows a simplified model based on the Singlehop principle. The veh_1 sends messages to all simulation entites(RSU, veh_2) that are using the same Ad-hoc channel. After transmission, the message can no longer be forwarded by the receiver.

Multihop Approach in Topobroadcast
In Multihop, the lifespan (amount of hops) of a message can be specified, allowing larger communication distances.
The following figure shows a Multihop example with a data package D (M, h = 2) from the vehicle veh_0 which contains a message M and a hop number h = 2. Assuming that a lot of simulation entities are using the same Ad-hoc channel the message can be forwarded over a along distance. After each forward the hop number will be incremented by 1. Since the hop amount was set to 2, the forwarding will stop after 2 increments.
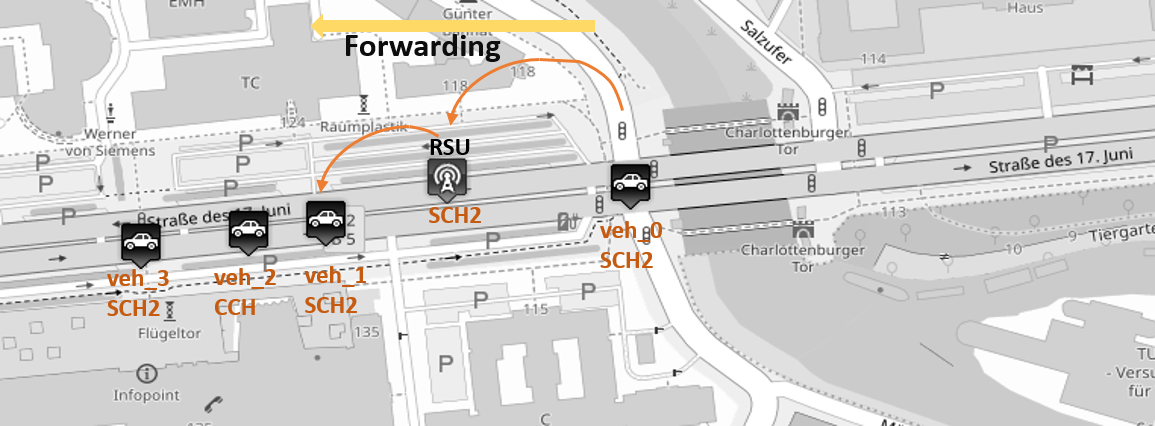
The next code snippet shows a configuration example with an Ad-hoc channel and a message lifespan hops = 2.
int hops = 2;
MessageRouting routing = getOs().getAdHocModule().createMessageRouting().topoBroadCast(hops);
getOs().getAdHocModule().sendV2XMessage(new MyV2XMessage(routing));
Ad-hoc Topocast
In addition to the Topobroadcast, the communication in Topocast mode will be addressed explicitly to the recipient and the addressing can be done either through receiver name (vehicle-ID e.g. veh_0) or the IP-Address of the vehicle.
final byte[] ipv4Address = {127,36,50,4};
AdHocChannel commonChannel = AdHocChannel.SCH1;
int hops = 2;
MessageRouting routing = getOs().getAdHocModule().createMessageRouting().topoCast(ipv4Address, hops);
getOs().getAdHocModule().sendV2XMessage(new MyV2XMessage(routing));
Ad-hoc Geobroadcast
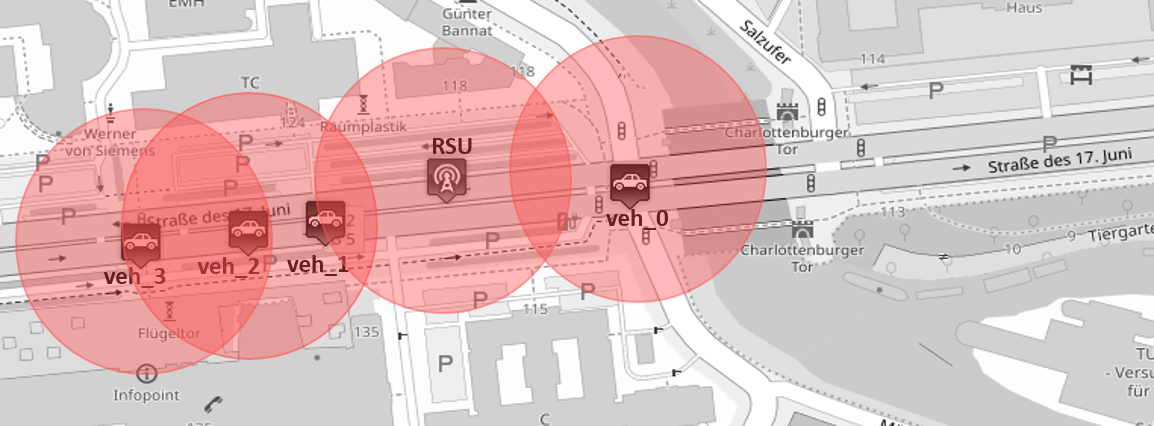
In contrast to Cellular Network above, the simulation entities act as active communication part (transmitter and receiver) and all simulation entities within range are getting messages in Geobroadcast mode.
As example in the following illustration, The vehicles veh_0, veh_2, veh_3 and the RSU are Ad-hoc equipped and there is no vehicle in the communication range of RSU, therefore a hop is not possible to next vehicle veh_0. But the vehicles veh_2 and veh_3 are able to communicate with each other.
With the methods
geoBroadCast(GeoCircle geoCircle)geoBroadCast(GeoRectangle geoRectangle)
of the Eclipse MOSAIC class AdHocMessageRoutingBuilder ,we are able, to configure the required area as a circle or a
rectangle.
GeoPoint center = GeoPoint.latlon(52.5, 13.2);
GeoCircle adHocModule = new GeoCircle(center, 3000);
MessageRouting routing = getOs().getAdHocModule().createMessageRouting().geoBroadCast(adHocModule);
getOs().getAdHocModule().sendV2XMessage(new MyV2XMessage(routing));
Analogous to the examples above, we can also configure the transmission area as a rectangle.
The next code snippet illustrates a possible configuration with a rectangular transmission area and a specified Ad-hoc channel.
GeoPoint pointA = GeoPoint.latlon(52.51355, 13.22000);
GeoPoint pointB = GeoPoint.latlon(52.52000, 13.21000);
GeoRectangle transmissionArea = new GeoRectangle(pointA, pointB);
MessageRouting routing = getOs().getAdHocModule().createMessageRouting().geoBroadCast(transmissionArea, AdHocChannel.SCH1);
getOs().getCellModule().sendV2XMessage(new MyV2XMessage(routing));
Ad-hoc Geocast
The class AdHocMessageRoutingBuilder only has one method for Geocasting mode,
geoCast(DestinationAddress destinationAddress, AdHocChannel adHocChannel). Communication is possible if the
IP-address of receiver is known and both (receiver and transmitter) are on the same Ad-hoc channel.
In this context the name Geocast is misleading, because a geological condition is not necessary.
As you can see in the next picture, the RSU uses the Ad-hoc channel SCH1 and several vehicles use different Ad-hoc channels. Assuming the RSU tries to send a message to veh_1 and has knowledge about the IP-Address of veh_1, if the vehicle veh_1 also uses the same channel SCH1, the transmission will be completed successfully.

Below you can see a possible configuration.
final byte[] ipv4Address = {127,36,50,4};
DestinationAddress destAddress = new DestinationAddress(ipv4Address);
AdHocChannel commonChannel = AdHocChannel.SCH1;
MessageRouting routing = getOs().getAdHocModule().createMessageRouting().geoCast(destAddress, commonChannel);
getOs().getAdHocModule().sendV2XMessage(new MyV2XMessage(routing));
CAM - Implementation
A Cooperative Awareness Messages (CAM) consists of four parts:
- Header with generic information
- MessageBody
- ServiceList
- TaggedValue list
First, generic information like protocol version, creation time stamp are submitted. Normally this data set follows a network beacon, which already contains data like position and speed. Nevertheless, this functionality must be implemented in the network layer, that means in the network simulator. At the moment this is not supported and is therefore compensated in the next message part, the message body. The body can contain either RSU or Vehicle awareness data. In the first case, only the RSU type is submitted, but this probably changes with a new CAM specification. In the second case, we provide date like vehicle width, length, position, speed, type and heading. The specification is not completely implemented, especially acceleration data and light, brake status are missing. The third part of the CAM specification, the service list, is also not implemented. This will probably change, when a list of services is defined by the ETSI. Last but not least a message contains a tagged list, a key value map with optional data. This is fully implemented and is used for our traffic light CAM messages, which provide the traffic light status in such a list.
User Defined Tagged Values
If you are required to exchange custom data within CAMs, the field UserTaggedValue can be used. For adding such data to the CAM, the application needs to implement the method beforeGetAndResetUserTaggedValue() from the CommunicationApplication interface. If a CAM is about to be sent, the custom data can be set using the getOs().setUserTaggedValue(byte[]) method. The receiver can simple access the data by accessing the field directly from the received CAM message:
byte[] value = cam.getUserTaggedValue ();
if (value != null) {
// read user tagged value}
}
Timing Requirements
CAMs are generated by the CAM Management and passed to lower layers when any of following rules apply:
- maximum time interval between CAM generations: $1s$;
- minimum time interval between CAM generations: $0.1s$;
- generate CAM when absolute difference between current heading (towards North) and last CAM heading > $4 deg$;
- generate CAM when distance between current position and last CAM position > $5m$
- generate CAM when absolute difference between current speed and last CAM speed > $1ms$;
- These rules are checked latest every $100ms$;