Algebraic variables
Consider a conveyor belt with a product on it:
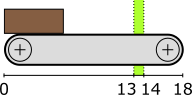
The product starts at the left side, at position 0. There is a sensor that can detect the product between positions 13 and 14. The product exits the conveyor at position 18. The following CIF specification models the conveyor, product, and sensor:
automaton conveyor:
disc real position = 0.0;
event move;
const real width = 6;
alg bool sensor = position + width >= 13 and position <= 14;
location:
initial;
edge move when position < 18 do position := position + 0.1;
endThe conveyor automaton models the conveyor, with a product on it. The product is modeled by means of the position of the left side of the product, relative to the left side of the conveyor. As the conveyor starts to move, the product moves as well, and its position on the conveyor is updated. The product moves in steps of 0.1.
The width of the product is 6. The sensor is on whenever the product, which spans from position to position + width, is within the sensor range, which spans from 13 to 14. An algebraic variable named sensor is used here, to represent the value of the sensor.
An algebraic variable is a variable whose value is determined by its definition. For the sensor variable, its value is determined from a calculation involving variable position and constant width. Unlike discrete variables, algebraic variables can not be assigned a new value. The value of algebraic variable sensor changes automatically as the value of discrete variable position changes. The value of algebraic variable sensor is true whenever the product is over the sensor, and it is false otherwise.
If we had modeled the value of the sensor as a discrete variable, we would have had to update the variable for every edge where the value of variable position is updated. In this example, that is only one edge. However, if the variable would have been updated on multiple edges, the sensor value would also have to be updated for all those edges. Furthermore, when adding another edge that updates the position variable, the edge needs to be adapted to also update the sensor discrete variable, which can easily be forgotten. Using an algebraic variable, the value computation needs to be specified only once, and no changes to its value are needed, as the value always remains consistent with its definition.
Algebraic variables can be used to give an expression (computations) a name, similar to how constants can be used to give fixed values a name. The benefits of using an algebraic variable are similar to the benefits of using constants. Both can be used to improve readability, and to make it easier to consistently change the model.
Algebraic variables can also be used as an abstraction. Consider the following extension of the specification:
automaton light:
event turn_on, turn_off;
location off:
initial;
edge turn_on when conveyor.sensor goto on;
location on:
edge turn_off when not conveyor.sensor goto off;
endThe idea is to have a light turn on when a product is detected by the sensor, and have it turn off when the sensor no longer detects the product. The algebraic variable sensor is used in the guard conditions of the light automaton, to determine when the light should be turned on or off.
In the example, the light automaton only uses the sensor variable from automaton conveyor. It does not matter how the value of that variable is defined. Currently, it is defined in terms of variable position and constant width. However, if the conveyor automaton were modeled differently, the expression that defines the value of the algebraic variable could be changed, without the need to change the use of the variable in automaton light.